SONAR-INFO-p116
SIDE SCAN SONAR
1) Introduzione 2) Modalità d'azione del sonar generico per navi di superficie 2) Modalità d'azione del sonar a scansione laterale
Il sonar a scansione laterale
In generale e sulle caratteristiche delle basi acustiche
Il SIDE SCAN SONAR è un particolare apparato sonar attivo studiato, prevalentemente, per la ricerca e la
mappatura nei fondali marini a scopi di archeologia subacquea ed altro.
Non entreremo nel dettaglio dei dati raccolti e presentati visivamente dall'apparato, dati peraltro
abbondantemente disponibili in rete, ma indagheremo sulla macchina e sul come consente rilevamenti accurati
di profili dei reperti giacenti sul fondo del mare.
In questa pagina cercheremo d'illustrare il "sonar a scansione laterale" ponendolo a confronto con
un generico sonar attivo installato su navi di superficie; ciò per meglio comprendere la filosofia di
funzionamento e la struttura fisica che caratterizza questo particolare apparato.
Il confronto tra i due consentirà inoltre di evidenziare le problematiche acustiche che
diversificano i due sistemi di rilevamento.
Il sonar attivi per navi di superficie hanno, tra i diversi modi d'emissione degli impulsi acustici,
il modo panoramico che consente d'irradiare detti impulsi lungo tutto l'arco dell'orizzonte in modo
che, se i fondali non sono troppo profondi, l'energia acustica si propaga secondo volumi cilindrici
così come, in modo molto approssimativo, è illustrato in figura 1 tramite la gabbia che coinvolge
una porzione di mare.
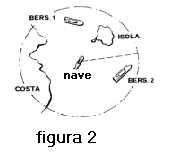
Prendiamo ora in esame un'ipotetico scenario subacqueo nel quale, attorno alla nave, figurino due
bersagli semoventi, un'isola ed una parte di costa disposti secondo figura 2
All'emissione degli impulsi acustici del sonar gli echi conseguenti alla geometria della zona
saranno visualizzati, con tratti luminosi, sullo schermo di rilevamento secondo quanto mostrato
in figura 3:

La visualizzazione dello scenario subacqueo si ottiene tramite un sistema di scansione spaziale
in grado di rivelare gli echi di ritorno dalle zone riflettenti; sistema per il quale possiamo, convenzionalmente,
definire il sonar come "SPACE SCAN SONAR".
Il sistema di scansione spaziale è realizzato da un insieme di fasci preformati fissi il cui numero può essere
stabilito secondo quanto illustrato nello studio riportato a pagina p3.
Ciascun fascio è delegato alla scoperta di echi provenienti dalla direzione per la quale è impostato,
i fasci contigui consentono il rilevamento di echi provenienti da direzioni intermedie tra di essi.
Il potere di discriminazione angolare del sistema a fasci preformati è dipendente dalla frequenza contenuta
negli impulsi emessi, dalle dimensioni della base d'emissione e dal numero dei fasci stessi.
Se per esempio si emettono impulsi a frequenza di 10 Khz con una base circolare d'emissione del
diametro di 1 m, ed il numero dei fasci preformati è n = 72 ( un fascio ogni 5° ) la risoluzione
angolare è di circa ra = 10° così come è visibile in figura 4 (si vedano le pagine p3, p94, p104):
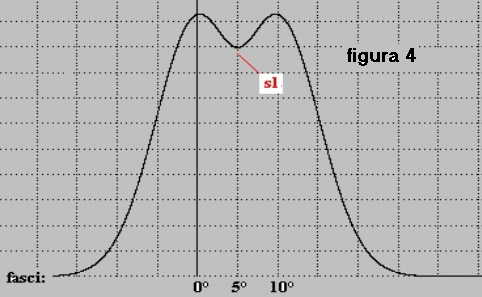
Dalla figura si evince che due bersagli distanti angolarmente di 10° sono perfettamente discriminabili
l'uno dall'altro grazie alla sella "Sl" che si forma nel fascio intermedio tra i due.
Se due semoventi sono distanti 1000 m dalla nave che li deve discriminare angolarmente, se le
caratteristiche del sistema a fasci preformati sono quelle di figura 4, i due bersagli potranno essere
disposti alle estremità di un arco non molto inferiore a circa 170 m.
Per distanze tra i semoventi nettamente inferiori a 170 m il sonar non sarà in grado di discriminare
l'un bersaglio dall'altro.
Naturalmente moltiplicando il numero dei fasci preformati la risoluzione del sonar può essere notevolmente aumentata.
Vedremo con quali criteri diversi si potrà valutare la discriminazione angolare del side scan sonar;
caratteristica questa che consente la scoperta e la classificazione degli oggetti sul fondo del mare.
Si può genericamente affermare che la ricerca dei bersagli, da parte di un "space scan sonar", è delegata
ad un insieme di fasci acustici fissi che ricevono gli echi dei bersagli in movimento.
Il "side scan sonar", invece, può essere considerato come un apparato nel quale un solo fascio acustico,
reso mobile grazie al movimento del sonar, è delegato a ricevere gli echi di bersagli fissi cosi
come si evince da figura A:

Il side scan sonar, contrariamente al sonar brevemente descritto al paragrafo precedente, deve consentire una
discriminazione angolare molto elevata per poter individuare echi provenienti da elementi riflettenti
del fondale, angolarmente molto vicini tra loro, allo scopo di:
-creare le carte nautiche e la rilevazione e l'identificazione di oggetti sottomarini
-ricercare le caratteristiche batimetriche dei siti.
-indagare le problematiche dell' archeologia marina
-aiutare a localizzare e identificare gli artefatti di origine antropica subacquee .
-classificare i fondali base al tipo di materiale di deposito.
-rilevare gli elementi di detriti e altri ostacoli sul fondo del mare pericolose per la navigazione
-controllare le installazioni sul fondo marino dell'industria petrolifera e del gas .
La modalità operativa di questo particolare sonar è illustrata nella seguente figura 5 che ci accingiamo
a commentare:

La nave pilota (NP), con le apparecchiature che costituiscono la parte di comando ed elaborazione dati
del side scan sonar traina, ad una velocità compresa tra i 2 ed i 6 nodi, un piccolo veicolo leggero (VL) che alloggia le parti bagnate del sonar.
L'insieme dei trasduttori d'emissione/ricezione del (VL) e l'elettronica associata, interfacciano con la
parte asciutta attraverso un cavo speciale di interscambio dati e segnali al fine di realizzare i fasci acustici
di scansione laterale.
La quota di navigazione di (VL) viene mantenuta costante intorno a 100-200 m dal fondo per profondità
del sito non superiori a 1000 m.
Durante il percorso (VL) emette, a cadenza programmata, segnali acustici impulsivi che illuminano
opportunamente il fondo (fasci di scansione laterale) al fine
di ottenere una serie di echi di ritorno che, ricevuti dalle basi acustiche di (VL), generano tensioni
impulsive da elaborare per la mappatura del fondale.
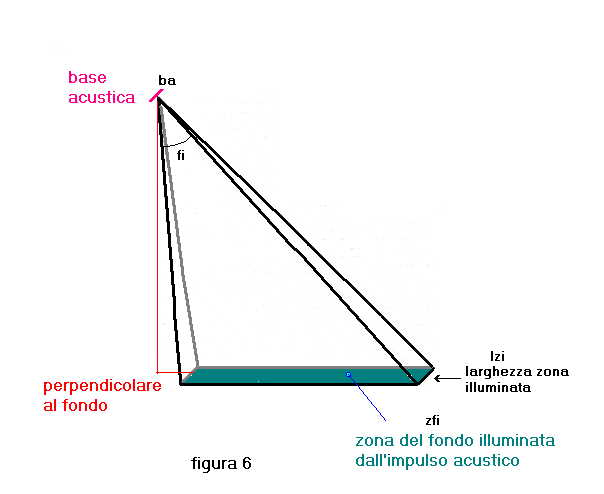
Un dettaglio di uno dei due fasci di scansione laterale è riportato in figura 6, in essa s'individuano:
- ba = base acustica (sono 2 alloggiate lateralmente sul veicolo "VL")
- fi = ampiezza fascio acustico di illuminazione nel piano verticale (il valore dipende dalla
caratteristica di direttività di "ba" in tale piano)
- zfi = zona del fondo illuminata dall'impulso acustico
- lzi = larghezza della zona illuminata (dipende dalla caratteristica di direttività orizzontale di "ba")
L'operazione di scansione acustica del fondale avviene, di principio, secondo la sequenza:
-1) (VL) emette un impulso acustico in grado d'illuminare, con spessore calibrato "lzi", le due sezioni
del fondo marino, sezione di destra e sezione di sinistra, viene esclusa la parte di fondale
sotto la verticale di (VL).
-2) gli echi delle piccole areole che formano le sezioni illuminate sono ricevuti dalle basi
idrofoniche di (VL) che le trasformano in tensioni elettriche; queste, opportune amplificate, filtrate e
trasformate con adatti convertitori A/D, sono inviate al sistema di calcolo ed elaborazione del sonar
su (NP).
-3) Il sistema di calcolo, in base alle differenze dei tempi d'arrivo dei singoli echi, individua
le posizioni delle piccole areole lungo la fascia illuminata "zfi" per la traduzione in formato video della
prima striscia di scansione.
-4) (VL), trainato da (NP), prosegue l'avanzamento e la sequenza si ripete.
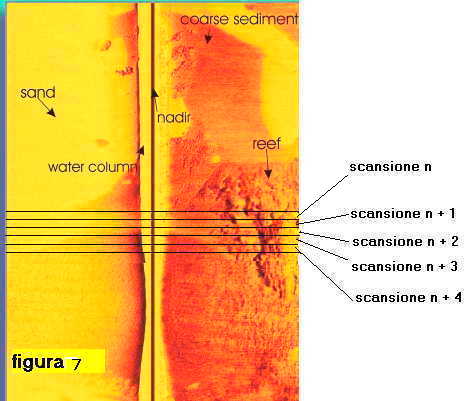
Ad ogni quaterna di azioni 1), 2), 3), 4) corrisponde una nuova striscia di scansione opportunamente
posizionata accanto alla precedente per realizzare l'effetto di presentazione video detto a cascata;
si veda in figura 7 una mappa dal vero di un fondale marino nella quale sono evidenziate alcune
strisce di scansione.
Gli algoritmi studiati per il processo dei segnali ricevuti dal (VL) sono appannaggio delle diverse
branche specialistiche di archeologia subacquea, a noi non resta che esaminare il funzionamento
del side scan sonar dal punto di vista della tecnica di formazione del fascio acustico.
3)Frequenze di lavoro e caratteristiche del fascio acustico per sonar a scansione laterale
Al fine di contenere le dimensioni delle basi acustiche del sonar ed avere una buona direttività le frequenze
di emissione sono dell'ordine delle centinaia di KHz.
L'ampiezza dell'angolo solido del fascio di scansione laterale è determinata dalle dimensioni di
ciascuna delle due basi acustiche alloggiate sui fianchi di (VL); le basi possono essere formate
da una serie di dischetti di ceramica piezoelettrica.
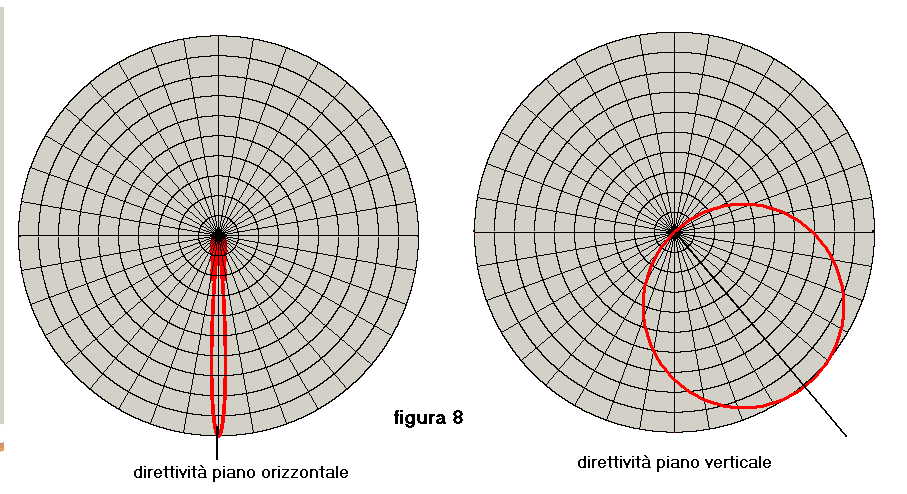
Le due sezioni dell'angolo solido, la sezione sul piano orizzontale (direttività orizzontale) e quella
sul piano verticale (direttività verticale), hanno ampiezze nel rapporto di circa 1/50 o superiore
così come è illustrato indicativamente in figura 8, ciò affinché si possa illuminare una superficie "zfi" stabilita
di larghezza "lzi" minima:
Le frequenze di lavoro dei side scan sonar sono, generalmente, variabili da 80 Khz a 600 Khz; i valori
di frequenza inferiori servono per la scoperta degli oggetti (bassa risoluzione), le frequenze superiori
per la loro classificazione (alta risoluzione).
Le ampiezze dei fasci acustici sono di massima:
Lobo di direttività verticale: circa 50° a - 3dB
Lobo di direttività orizzontale per bassa risoluzione circa 1° a -3 dB
Lobo di direttività orizzontale per alta risoluzione circa 0.25° a -3 dB
4)Calcolo delle caratteristiche di direttività del side scan sonar
Il calcolo delle caratteristiche di direttività del side scan sonar deve essere impostato partendo
dalla larghezza d'esplorazione laterale voluta e dalla discriminazione angolare che l'apparato
deve avere per classificazione dei bersagli.
Impostiamo tali calcoli per tracciare una linea ipotetica di lavoro che indichi, di massima, le
problematiche connesse alla soluzione del complesso problema.
4.1)Caratteristica di direttività nel piano verticale
La caratteristica di direttività verticale è subordinata all'ampiezza voluta per l'estensione dei fasci laterali.
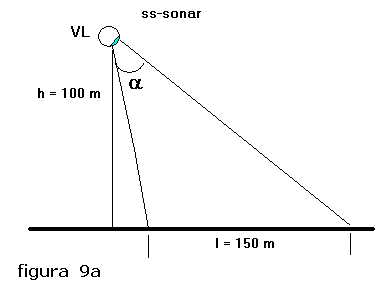
Se ad esempio vogliamo che a 100 m dal fondo, a seguito dell'emissione di un impulso acustico a 80 KHz,
s'illuminino due fasce di ampiezza di circa 150 m ciascuna, l'ampiezza α dei lobi delle due basi
di trasmissione, valutata al livello di - 3 dB rispetto al massimo, deve coprire i 150 m così come
mostra la figura 9a; ne segue che l'angolo α deve essere:
α ≈ arctang ( l / h ) = arctang ( 150 / 100 ) = 56 °
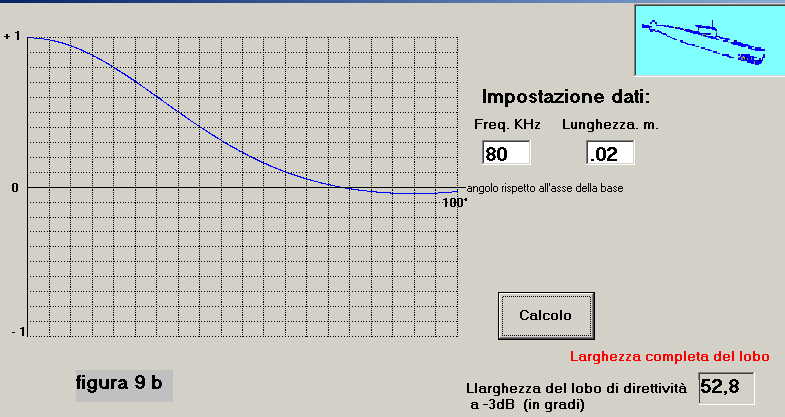
La valutazione delle dimensioni verticali delle basi acustiche si esegue rapidamente, dopo alcuni
tentativi, utilizzando il calcolatore SONARMATH (vedi p6) come mostra la figura 9b, che indica
che il valore più prossimo ad α = 56° in α' = 52.8° è ottenuto con un trasduttore dalle
dimensioni di 2 cm; questo può essere il diametro dei singoli idrofoni a dischetto che compongono
le basi acustiche del side scan sonar.
4.2)Caratteristica di direttività nel piano orizzontale
La caratteristica di direttività orizzontale è subordinata all'ampiezza necessaria per la scoperta e/o
la classificazione dei reperti sul fondo del mare.
In caso di scoperta la discriminazione angolare può essere modesta, nel caso di classificazione la discriminazione
angolare deve essere elevata.
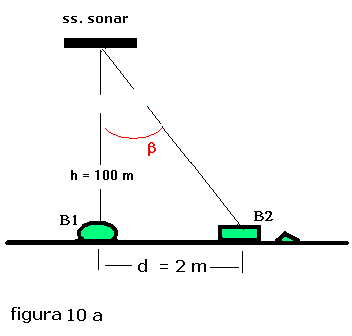
Se ad esempio, in fase di scoperta a frequenza di 200 KHz, vogliamo che a 100 m dal fondo si possano
discriminare le posizioni di due oggetti distanti tra loro di 2 m abbiamo la geometria di figura 10a
dalla quale possiamo calcolare l'angolo β sotto il quale, a 100 m, si vedono i due oggetti:
β = arctang (d / h ) = arctang ( 2 / 100 ) = 1.1°
Se durante una scansione imponiamo che il livello dell'eco ricevuto da B2, al fine di non farlo
inteferire con il livello d'eco di B1, sia inferiore a quello di B1 nel rapporto 1/10 = 0.1 ( pari a - 20 dB ) la
lunghezza della base dovrà essere tale che l'attenuazione del lobo di direttività sotto
l'angolo di 1.1° sia -20 dB rispetto al massimo; per la ricerca delle dimensioni della base
idrofonica in oggetto si deve ricorrere all'uso della funzione del tipo
Sen x / x sotto indicata:
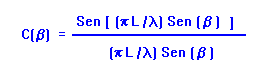
dove:
β = angolo di puntamento
L = lunghezza della base (dato incognito)
λ = 1530 / f
Equazione trascendente da risolvere in L per:
β = 1.1°
f = 200 KHz
C(β) = 0.1
La strada più semplice per la soluzione del problema è scrivere:
Sen(x) / x = 0.1
risolvibile in x, o con metodo iterativo, o con tabelle della funzione Sen x/x
in entrambi i casi si ha: X = 2.85 ; con questo valore si può scrivere:
3.14 (L/λ) sen 1.1° = x = 2.85 ed infine, essendo
λ = 1530 / 200000:
L = (2.85 / 3.14) (1530 / 200000) / Sen 1.1° ≈ 36 cm.
La curva di direttività calcolata per questa base è riportata, a tratto rosso, in figura 10b.
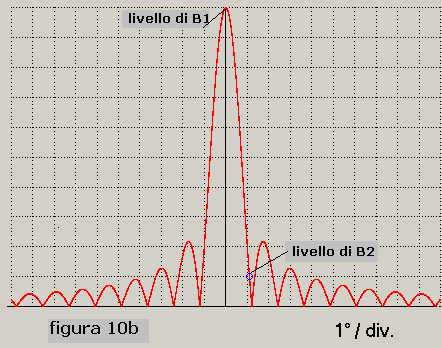
La figura mostra il punto a 1.1° con l'ampiezza voluta di ≈ 0.1.
5) Considerazioni su space scan e side scan sonar
La realizzazione del sonar tradizionale implica una notevole struttura
hardware e software per la composizione dei numerosi fasci acustici, fissi, necessari per la scoperta
dei bersagli, mobili e non, lungo tutto l'orizzonte subacqueo; necessita quindi di apparecchiature
ingombranti e costose.
Il side scan sonar invece, grazie allo scorrimento del lobo acustico secondo la rotta nave, è dotato
di un solo fascio di scansione che semplifica notevolmente la composizione dell'apparato che può essere
contenuto, per la maggior parte, nel veicolo trainato le cui le piccole dimensioni possono essere di
massima:
diametro = 15 - 20 cm
lunghezza = 100 - 130 cm