SONAR-INFO-p104
La variazione del potere di risoluzione del sonar
Funzioni attiva e passiva 1) Premessa 2)L'algoritmo necessario per l'esame del parametro risoluzione 3)La risoluzione angolare del sonar 4)Interpretazione tecnica di figura 4 5)La variazione del parametro di risoluzione angolare 6)Conclusioni
Il tema relativo ai parametri acustici del sonar è stato parzialmente argomentato
nella pagina p102; tra i diversi parametri la risoluzione che consente all'apparato
di discriminare tra due dati; in particolare, sulla pagina citata, si è trattato della risoluzione angolare relativa
alla discriminazione della posizione tra due bersagli.
La presente pagina per riprende quell'argomento al fine di esaminare come varia il parametro
della risoluzione angolare del sonar quando i due bersagli da discriminare non sono
ricevuti dalla base idrofonica ricevente con lo stesso livello di pressione acustica.
Per l'esame del parametro citato è necessario ricorrere all'algoritmo ideato per la stesura
dello studio riportato in pagina p3 che consente di assimilare, con buona approssimazione, il
grafico di una curva di direttività ad una funzione Gaussiana.
Dato che le funzioni per il calcolo delle curve di direttività non sono adatte a semplici
manipolazione numeriche, l'algoritmo sostitutivo ben si presta all'esecuzione dei computi che
ci mostrano la variabilità del parametro risoluzione angolare.
L'operazione si svolge sostituendo al grafico della caratteristica di direttività, comunque
tracciato, la funzione:
y(β) = exp (-α β²)
nella quale:
β: variabile angolare
λ : funzione delle caratteristiche geometriche della direttività
secondo l'espressione:
λ = (1/βo) ln (1/k)
nella quale βo e k si ricavano dalla curva di direttività tracciata, ad esempio, in figura 1:
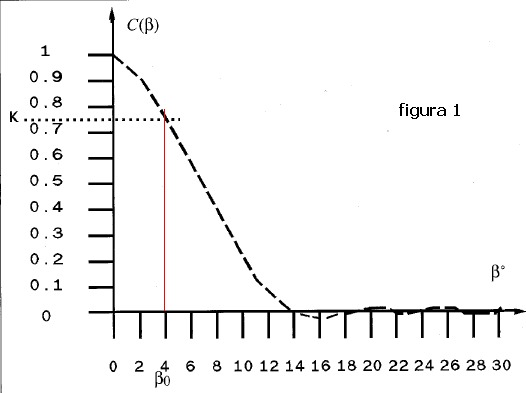
La curva di direttività di figura 1, C(β), presa ad esempio, mostra un lobo della larghezza di circa
10° a -3 dB; su di essa si sceglie, di poco sopra ai -3 dB, la coppia:
βo = 4°
k = 0.74
con la quale calcolare λ = (1/βo) ln (1/k) che definisce la funzione Gaussiana:
λ = (1/4°) ln (1/0.74) = 0.0188
infine la funzione cercata:
y(β) = exp (-α β²) = exp (-0.0188 β²)
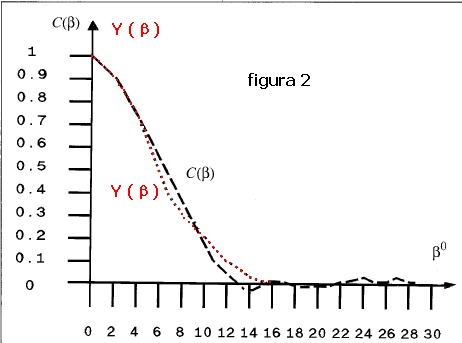
La figura 2 mostra il grafico della funzione Gaussiana tracciato per punti sopra la curva di direttività
dal quale discende; come si vede dalla traccia rossa della curva teorica questa sposa bene il
grafico della direttività originale nella zona più significativa di questo.
Con la funzione ricavata possiamo ora trattare quest'ultima come caratteristica di direttività
di un sonar del quale si voglia studiare il parametro di risoluzione angolare; il grafico tracciato
in figura 3 rappresenta il sostituto analitico di figura 1 secondo la funzione y(β) = exp (-α β²)
elaborata al P.C. La curva è tracciata su: ascisse 5°/div. - ordinate 0.1 / div.
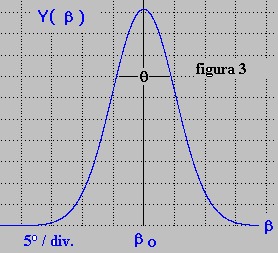
La y(β), che sarà alla base delle nostre osservazioni, presenta il massimo della
direttività per
βo = 0° con un lobo di circa 10° a -3dB , ovvero Θ = 10°
Se ad esempio la caratteristica di direttività di un sonar è quella tracciata in figura 3
la risoluzione angolare, definita in via convenzionale, è indicata come scritto in p102:
"Concludendo possiamo infine scrivere che, con buona approssimazione, la risoluzione
angolare Δφ è
identificabile con la larghezza, a -3dB, del lobo di direttività; ovvero: Δφ = θ" = 10°.
Questo significa che tracciando due curve di direttività, la prima per un bersaglio a 0°, la
seconda per un bersaglio a 10°, nell'ipotesi che entrambi i bersagli siano ricevuti dal sonar con
la stessa pressione acustica, si ha il grafico di figura 4:

La figura in oggetto mostra la caratteristica di direttività teorica del sonar tracciata per
le direzioni 0° e 10°.
Da un punto di vista tecnico se pensiamo le due curve come
risultato della scansione dell'orizzonte subacqueo eseguita attraverso un sistema di fasci
preformati con interpolazione, fasci disposti a 5° l'uno dall'altro, dobbiamo osservare che
mentre i fasci a 0° e 10° hanno una ampiezza, praticamente indipendente l'una dall'altra
il fascio intermedio, per la direzione 5°, è caratterizzato da un'ampiezza pari alla somma
delle potenze dovute dai fasci adiacenti che s'incontrano su detto fascio.
Dopo questa osservazione è utile ripensare alla scansione interpolata tra i fasci per giungere
alla conclusione che tale scansione è dovuta alla somma delle funzioni di direttività secondo
il seguente prospetto:
S1 : definisce la direttività a 0° con y(β) = exp (-α β²)
S2 : definisce la direttività a 10° con y(β) = exp [-α (β + 10)²]
S3 : definisce la scansione interpolata tra i tre fasci tramite la somma delle potenze di S1 e S2
S3 = √( S1² + S2² ) = √{[exp (-α β²)]² + [exp (-α (β+10)²)]²}
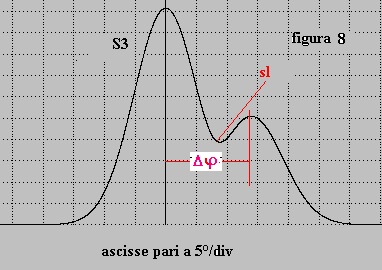
La curva S3 di scansione interpolata sui tre fasci è riportata in figura 5:

In virtù dell'ampiezza della sella (sl), circa 0.1, che si forma sul fascio a 5° è possibile discriminare tra il
bersaglio a 0° e quello a 10°: la S3 mostra infatti , da un punto di vista tecnico, la risoluzione angolare
Δφ del sonar in esame.
Se i due bersagli del sonar generano, come mostrato in precedenza, lo stesso livello di pressione
acustica sulla base ricevente del sonar, il diagramma di figura 5 interpreta correttamente
la presentazione video della
scansione con interpolazione del sistema a fasci preformati.
Se invece i due bersagli non generano la stessa pressione acustica sulla base ricevente la curva
di scansione tra i fasci si deforma con un deterioramento progressivo della capacità di risoluzione
del sonar tanto più marcato quanto aumenta la differenza dei due livelli di pressione.
Per avere un'idea del fenomeno supponiamo, nel caso di par. 4, che i livelli di pressione acustica
ricevuti dalla base del sonar siano nel rapporto: S2 / S1 = 0.5.
Questa nuova condizione, con S2 < S1, è rappresentata dalla ripetizione delle figure 4 e 5 in figura 6:
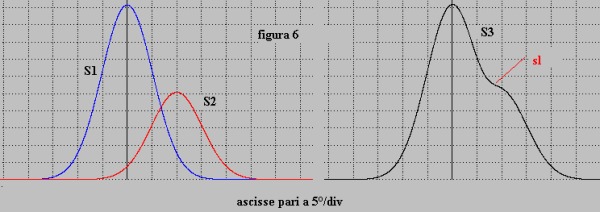
La figura mostra con tutta evidenza che questa situazione consente con difficoltà la discriminazione del
bersaglio S2 in quanto l'ampiezza della sella (sl) è praticamente irrilevante.
In figura 6 la capacità di risoluzione angolare del sonar non rispetta l'assunto iniziale:
"la risoluzione angolare Δφ è identificabile con la larghezza, a -3dB, del lobo di
direttività; ovvero: Δφ = θ" = 10°".
Con la variazione del rapporto S2/S1, per valori inferiori ad 1, per mantenere il valore dell'ampiezza
della sella (sl) al livello di circa 0.1, così come illustrato al paragrafo 4), è necessario assumere
un valore più ampio di Δφ accettando il degrado delle prestazioni del sonar secondo il
diagramma riportato in figura 7:
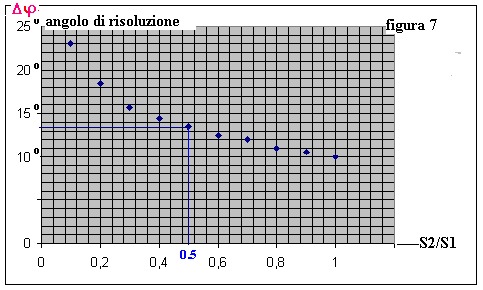
Nel caso già considerato in figura 6 si può ottenere un'ampiezza di (sl) di circa 0.1 se si
dispongono i due bersagli ad una distanza angolare, indicata in figura 7 con le coordinate blu, pari
a circa 14°, così come illustrato in figura 8:
Nello svolgimento del tema posto è stata assunta un'ampiezza di (sl) = 0.1, pari a circa il 10%
dell'ampiezza di S1 come conseguenza dell'assunto convenzionale che indica : Δφ = θ ;
ciò assicura una facile risoluzione tra i bersagli da discriminare.
Si comprende che anche valori di (sl) inferiori a 0.1 consentono, entro certi limiti,
la discriminazione tra le due sorgenti acustiche se il rumore dell'ambiente subacqueo lo consente.
La trattazione dell'argomento, al di là delle possibili scelte e condizioni ambientali, vuole
mostrare come uno dei parametri più significativi del sonar sia subordinato a particolari condizioni
che non sempre possono verificarsi; la risoluzione angolare risulta dipendente, per
quanto visto, dal rapporto tra le pressioni acustiche che colpiscono la base ricevente
del sonar; pressioni acustiche dei bersagli che possono variare sia per le stazze dei mezzi
che le generano, sia per le loro velocità che per la loro distanza dal sonar.