SONAR-INFO-p156
Progetto di sistema di un sonar a bassa frequenza (sesta)
Unità di Calcolo - Conversione A/D - Presentazione
1) Generalità 2) Dati di specifica tecnica 3) L'insieme della struttura sonar 4)Lo schema a blocchi delle funzioni dell'unità di calcolo (UC) 5) Sul criterio di campionatura dei segnali analogici 6) I convertitori Analogico-Digitale 7) La presentazione dati 8)A chiusura del progetto
Il progetto di sistema si completa con l'indicazione delle linee guida per il software e per l'impostazione
della struttura di visualizzazione e il rilevamento dei bersagli.
Si parla di linee guida lasciando libertà al gruppo delegato al software di scegliere la strada più adatta alla
soluzione dei molteplici problemi che il lavoro pone.
Resta comunque tassativo l'obbligo di cooperazione tra il soggetto che ha studiato il sistema
e il gruppo che dovrà sviluppare il software.
Ricordiamo che i livelli dei segnali acustici saranno espressi in dB/μPa/√Hz , le tensioni in
dB/V/√Hz, i dati elaborati dai calcolatori come rapporti tra segnali e disturbi S/N(dB).
Come in precedenza il seguente paragrafo 2) riporta i dati di specifica tecnica.
Di seguito sono riportate le voci delle diverse caratteristiche volute dall'utilizzatore:
A)- Tipo base ricevente : conforme allo scafo del battello ( zona a proravia compresa in un
settore di +/- 160° )- limitandone al massimo le dimensioni e il peso -.
B)-Portata di scoperta minima al traverso: R = 55 Km alle condizioni:
Propagazione sferica
Bersaglio CT a 15 nodi
Stato del mare SS = 2
Condizioni probabilistiche: Priv = 90 % Pfa = 5 %
Unico grado di libertà: "DI" guadagno di metà base conforme al traverso
C)- Banda delle frequenze di ricezione : 200 Hz - 3500 Hz
D)- Rumore dei preamplificatori Ne < mare forza zero (SS=0)
E)- Scoperta a fasci preformati : in un settore di +/- 160° rispetto all'asse del battello
F)- Processo dei segnali: in correlazione
G)- Costante di tempo d'integrazione: RC = 1 Sec.
H)- Dinamica per CT a 15 nodi da 100 m a 55 Km
I)- Errore strumentale massimo di rilevamento al traverso : Δα = 1°
L)- Risoluzione angolare al traverso: Δφ = 5°
M)- Presentazione video a cascata in BRQ (storia 30 Sec) con indice di collimazione man. e aut.
Prima d'iniziare l'ultimo percorso di studio esaminiamo l'insieme della struttura del sonar
che emergerà dal lavoro precedente e da questa pagina.
L'insieme in oggetto è schematizzato in figura 1:
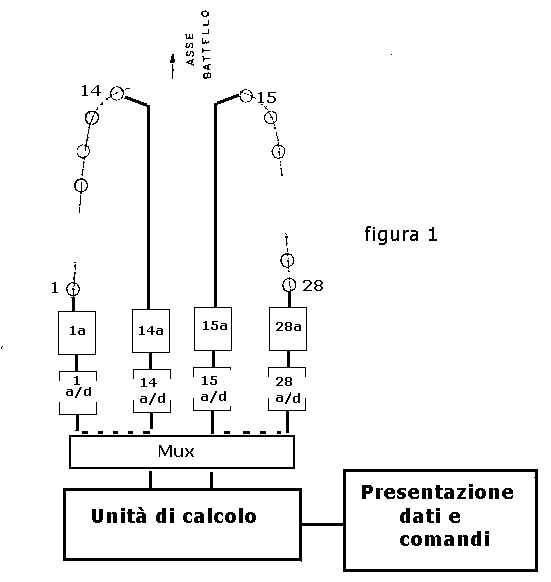
In figura sono indicati i 28 canali di segnale nei quali:
- la parte analogica è indicata con:
1a...28a
- la parte digitale di conversione A/D con:
1a/d....28a/d
La prima parte è stata studiata nelle cinque pagine precedenti, resta ora da esaminare
quella digitale come indirizzo al progettista del software.
Per inquadrare al meglio il lavoro di sviluppo del software è utile mostrare uno schema
a blocchi delle funzioni che devono essere svolte dalle diverse routine che comporranno
il programma operativo implementato nell'Unità di Calcolo (UC); lo schema in oggetto
non è da confondere con il diagramma di flusso su UC che è di esclusiva competenza
di chi sviluppa il software.
Lo schema è riportato in figura 2 e di seguito commentato:
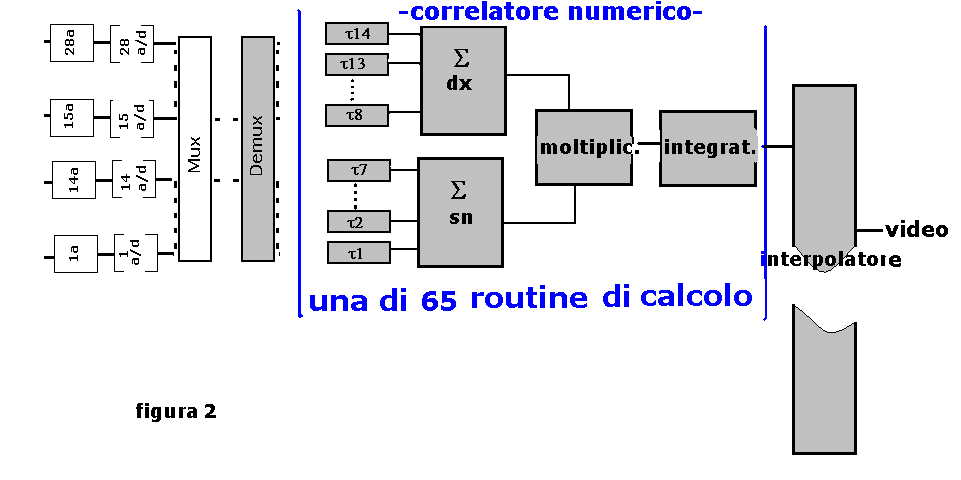
La figura è divisa con rettangoli di due colori;
-la parte dei rettangoli bianchi che interessa i 28 canali analogici i convertitori AD ed il
MUX (multiplexer) che sono interfacciati con UC ma non ne fanno parte.
-la parte dei rettangoli grigi che focalizza le complesse funzioni software sviluppate dall'Unità
di Calcolo (UC) come segue:
*il DEMUX (demultiplexer) come funzione sviluppata da UC
*Una delle 65 routine di calcolo in correlazione per la formazione dei fasci preformati
costituita ciascuna da:
-- 14 canali di ritardo ( i simboli della figura si riferiscono al fascio al
traverso sinistro) dove con tao1... tao14 sono specificati i ritardi del fascio indicato, sulla
scorta del ritmo di campionatura impresso da UC sui convertitori A/D.
Per ciascuno dei 65 fasci la serie dei ritardi viene definita, successivamente,
su indicazione del costruttore del battello che deve fornire la mappa precisa della sistemazione
a scafo dei 28 idrofoni della base; in un secondo tempo, con la collaborazione del sistemista,
sono scelti opportunamente i 65 gruppi da 14 idrofoni che concorrono alla formazione dei 65 fasci.
La quantizzazione dei ritardi tao, subordinata alla frequenza di campionatura dei convertitori A/D,
sara definita in apposito paragrafo di questa pagina.
-- Due funzioni di somma di 7 segnali numerici; ∑ sn e ∑ dx.
-- Una funzione di "moltiplicazione"
--Una funzione d' integrazione numerica con tempi selezionabili da 0.2; 0.4; 1.0; 2.0 Sec.
* una funzione d'interpolazione numerica tipo Sen(x)/(x), comune ai 65 fasci, che invia i dati elaborati
al sistema di presentazione video controllato da UC.
Il criterio di campionatura dei segnali per questo progetto può tener conto di quanto indicato
in numerose pubblicazioni, ad esempio quella illustrata su p128, che prevedono la campionatura
naturale secondo Nyquist e l'inserzione a software di sottocampioni intermedi, vedi figura 2a, per
consentire la quantizzazione dei ritardi tao1... tao14.
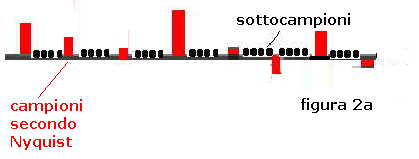
Per stabilire il numero dei sottocampioni si possono fare le seguenti considerazioni:
I fasci preformati che sono costruiti nelle 65 routine di calcolo all'interno della UC di figura
2 seguono la teoria della correlazione così come richiesto dalle specifiche tecniche alla lettera F).
L'algoritmo che descrive il processo di correlazione di figura 2 per un fascio a 10° rispetto
all'asse al traverso è il seguente:
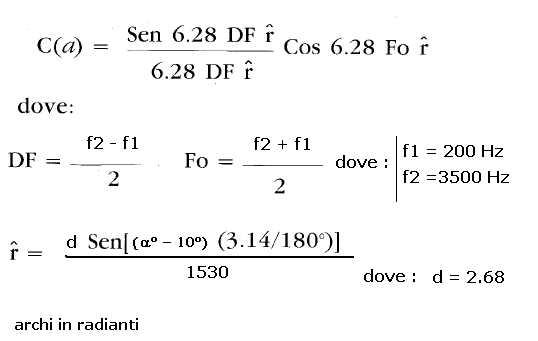
nel quale i limiti di banda sono quelli di specifica e la distanza "d" tra le sorgenti acustiche
virtuali è assimilabile a quella tra due sensori idrofonici disposti nei due baricentri delle
semibasi reali così come si vede, con 2 dischetti rossi, in figura 3 già mostrata in p152:
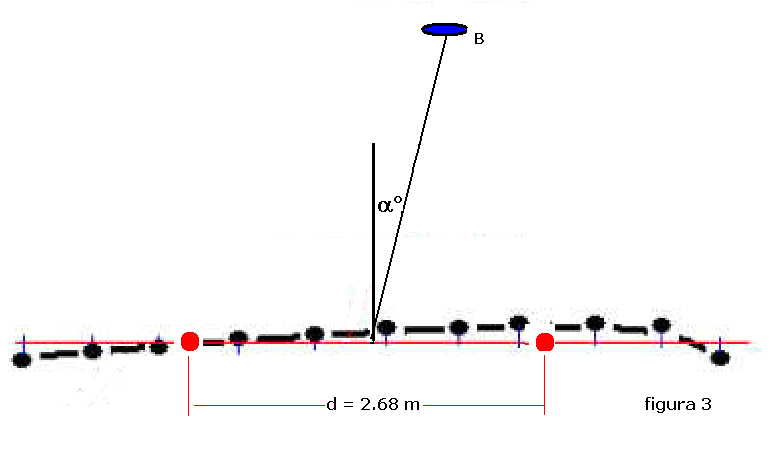
Su questa base ideale possiamo applicare l' algoritmo e tracciare la curva
di correlazione rappresentativa del fascio preformato al traverso, ad esempio, per la direzione
alfa = 10° dov'è presente il bersaglio "B":
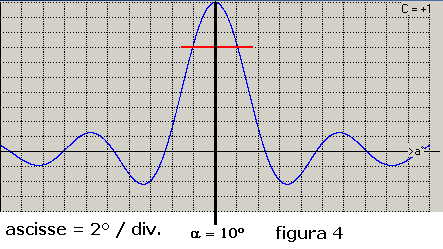
E' interessante il confronto tra questa curva e la direttività indicata in p152, entrambe hanno, sul
massimo, lo stesso profilo e la stessa larghezza del lobo a - 3 dB ( circa 4° ); il fascio al
traverso è quindi rappresentato correttamente sia con la prima che con la seconda curva a dimostrare
che l'assunto di p152 su figura 3 era corretto.
La curva di figura 4 nasce nel presupposto che il rumore del bersaglio "B" di figura 3, una volta
colpita la base idrofonica, si trasformi in 14 tensioni elettriche prima ed in 14 numeri dopo
tutti quanti ritardati ad arte in modo perfetto da tao1...tao14 di figura 2 tali da essere sommati da
∑ sn e ∑ dx sempre di figura 2 in modo coerente.
Qualora invece i valori di tao1...tao14 fossero dati da multipli di 1/Fc,
la campionatura discreta dei segnali analogici non
consentirebbe ai ritardatori di compensare perfettamente i ritardi dovuti alla posizione
del bersaglio rispetto alla base acustica il rilevamento ideale per alfa = 10° si altererebbe.
Si misurerebbe un rilevamento diverso da 10°; tanto più diverso quanto più fossero imperfetti i ritardi
di tao1...tao14; è da questo errore che vogliamo trarre i tempi di campionatura che possano
soddisfare il progetto.
La curva di figura 4 è definita da un algoritmo che consente di stabilire quale errore angolare di rilevamento
scaturisce a seguito del fatto che i segnali all'uscita di ∑ sn e ∑ dx,
non abbiano un identico ritardo.
Se accettiamo un errore di rilevamento di 0.5° -punto I) s.t.- possiamo calcolare "r"
come differenza massima di ritardo ammessa tra ∑ sn e ∑ dx, abbiamo:
r = d Sen(0.5°) / 1530 = 2.68 Sen(0.5°) / 1530 = 15.2 microSec.
Stabilito il limite d'errore accettabile cerchiamo il numero dei sottocampioni valutando
la Fc secondo Nyquist: Fc = 2. 5 * 3500 = 8750 Hz
dalla quale possiamo calcolare la frequenza di scansione Fs dei 28 canali analogici pari a :
Fs = Fc * 28 = 245000 Hz
La frequenza di Fs è ragionevolmente contenuta per il trasferimento dei 28 canali dai convertitori
A/D alla UC.
Ora se valutiamo il periodo di Fc: tc = 1/Fc = 114 microSec. e facciamo il rapporto
tc/r = 114/15.2 ≈ 8 otteniamo il numero dei sottocampioni necessari per la generazione di
di una sufficiente quantizzazione di tao1...tao14;
avremo infatti un errore massimo su tao1...tao14 pari a tc/9 = 12.66 microSec.(inferiore all'errore
calcolato con r = 15.2 microSec.) equivalente ad una campionatura fittizia alla frequenza
di circa 80000 Hz per ciacuno dei 28 canali pari a: ( 2240000 Hz ).
I 28 convertitori A/D sono comandati da UC che ne stabilisce il ritmo di campionatura e il
sincronismo, a UC rendono, attraverso il multiplexer MUX, le stringhe numeriche dei segnali
analogici convertiti.
I convertitori A/D devono avere:
*Una dinamica uguale o superiore da quanto emerso dal
diagramma dei livelli di p150:
- il livello minimo dei segnali è di 3.9 mVeff
-il livello massimo dei segnali è di 2230 mVeff (≈ 6600 mVpicco: p148-par.6)
*Una velocità di conversione compatibile con il valore di tc = 114 microSec. definito nel
paragrafo 5):
*Un numero di bit = 16
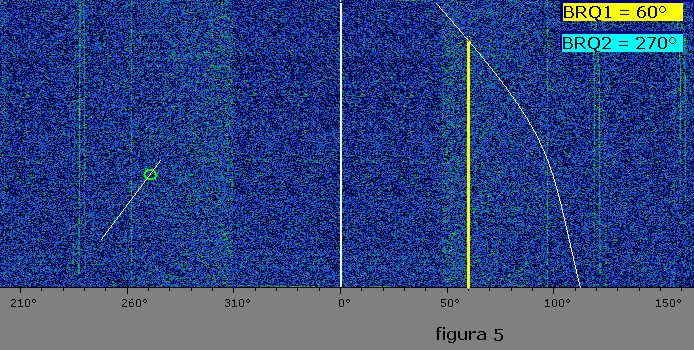
La presentazione dati così come definito nelle specifiche tecniche al punto M) deve essere
realizzata, su display rettangolare, in BRQ e con caratteristica a cascata con una storia di almeno
30 Sec.
La schermata deve essere divisa sulla mezzeria ( BRQ = 0°) da un segmento bianco fisso che
indica l'asse longitudinale del battello.
Un indice verticale di color giallo deve essere posizionabile dall'operatore, tramite comando
da apposito volantino, in angolo e ampiezza per il rilevamento manuale di un bersaglio.
Un secondo indice circolare di color verde deve essere posizionabile dall'operatore, tramite comando
da apposito volantino, in orizzontale e verticale e, a seguito abilitazione manuale, deve poter inseguire in automatico
l'evoluzioni di un bersaglio selezionato.
Sull'angolo superiore destro del display devono comparire sia il valore del BRQ collimato dall'indice
manuale, sia il BRQ collimato dall'inseguimento automatico.
Tutto indicativamente come mostrato in figura 5.
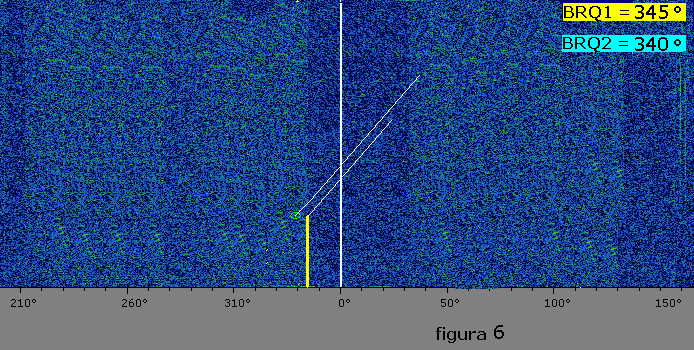
Dato che la presentazione dei bersagli è a cascata l'ampiezza dei segnali idrofonici è
visualizzata tramite intensificazione della traccia luminosa; deve quindi essere prevista
una regolazione manuale di tipo logaritmico in grado di coprire i circa 70 dB di
dinamica così come evidenziato nel diagramma dei livelli di p150.
In ogni caso la suddetta regolazione deve consentire la visualizzazione di due bersagli, con
simulatore di collaudo, ad una distanza angolare di 5° e pari intensità nell'ambito della dinamica
individuata nel citato diagramma così come mostra figura 6.
Con questo lavoro, articolato in sei pagine del sito, si è voluto dare un'indicazione
delle procedure da impostare per sviluppare un "Progetto di sistema" per sonar, tale che possa
servire da supporto alla progettazione acustica - elettronica - software di un apparato
definito da apposite specifiche tecniche.
Le specifiche, riportate su ciascuna delle sei pagine al paragrafo 2), sono state stilate come esempio
del tipo di richieste dell'utilizzatore; in realtà un sonar richiede specifiche molto più
ampie e approfondite rispetto a quelle indicate.
Sarà sempre compito del sistemista interpretarle e svilupparle, sistemista che, in Aziende
di piccole dimensioni s'identifica con il progettista dell'elettronica.
Per lo sviluppo del software e delle parti acustiche il sistemista dovrà collaborare con altre
due figure professionali.