SONAR-INFO-p208
La struttura fine dell'equazioni del sonar passivo
1) Generalità 2) L'equazione applicativa del sonar passivo
3) Esame dettagliato dei termini logaritmici della 001) -funzione d'attenuazione-
4) Esame dettagliato dei termini logaritmici della 002) (funzione di massima attenuazione)
5) Passaggio dalla funzione lineare 7) alla 002)
L'impostazione citata non offre però facilità di comprensione del legame esistente tra
le variabili a chi per la prima volta s'interessa dell'argomento.
Con questo lavoro vogliamo mostrare come nascono le equazioni applicative del sonar passivo
mediante l'analisi della struttura fine delle stesse.
S'inizia con un richiamo dettagliato delle equazioni citate per procedere poi
alla loro analisi.
L'analisi, per renderne semplice la comprensione, è svolta in modo non rigorosamente
scientifico pur salvaguardando la correttezza dei risultati finali.
1) TL = 60 dB + 20 Log R + a R [attenuazione per divergenza sferica e assorbimento] 001)
2) TL = SL + DI - NL - DT + 10 Log BW [massima attenuazione consentita] 002)
Elenchiamo di seguito, illustrandone la specificità, la serie delle variabili che consentono
i calcoli di previsione delle portate di scoperta del sonar passivo(dove s'indica ../Hz s'intende radice di Hz):
*F1 ; F2 = la banda delle frequenze di ricezione del sonar in Hz (ad es. tra 5000 Hz e 7000 Hz)
*fo = frequenza media geometrica nella banda ( ad es. V(5000 Hz x 7000 Hz)= 5916 Hz )
*SL = il rumore "spettrale" irradiato dal bersaglio in dB/microPascal/Hz (ad es. il rumore emesso
da un cacciatorpediniere navigante a 20 nodi alla frequenza di 6000 Hz è di 129 dB/microPascal/Hz)
*NL = il rumore "spettrale" dovuto allo stato del mare in dB/microPascal/Hz (ad es. il
rumore del mare a stato S = 4 "definito come mare agitato" alla frequenza di 6000 Hz è 54 dB/microPascal/Hz)
*DI = il guadagno di direttività della base idrofonica ricevente in dB
(ad es. 18 dB alla frequenza di 6000 Hz)
*RC = la costante di tempo di rivelazione del sistema video in Sec. (ad es. RC = 2 Sec.)
*d = il valore, in numero puro, legato alla probabilità di scoperta e falso allarme accettata
( ad es. per d = 9 si prevede il 90% di probabilità di scoperta e il 5% di falsi allarmi)
*Propagazione = ipotesi sul tipo di propagazione- "Sferica" o "Cilindrica" -(ad es. in acque poco
profonde si ipotizza prevalentemente la combinazione: sferica per i primi 1000 m e cilindrica oltre)
* R = variabile che caratterizza l'attenuazione del suono lungo il percorso in mare, espressa in Km
(ad es. da R= 0.1 Km a R = 20 Km )
*a = coefficiente d'attenuazione, in dB/Km, relativo alle caratteristiche di assorbimento del suono
nell'acqua in funzione della frequenza (ad es. per f = 11000 Hz a = 0,67 dB/Km )
* BW = banda di ricezione in Hz ( ad es. se f1 = 5000 Hz e F2 = 7000 Hz: BW = 2000 Hz )
* DT = soglia di rivelazione in correlazione in dB; dipende da "d" , BW e RC (ad es. può valere DT =16 dB)
*TL = variabile, espressa in dB, che indica la generica attenuazione del segnale
( ad es. TL = 80 dB può essere riferito sia all'attenuazione dovuta al percorso del suono, sia
all'attenuazione massima accettata in base ai parametri sopra elencati)
Il primo rapporto tra grandezze è relativo al calcolo dell'intensità acustica di
emissione "Ie" (calcolata ad 1 m di distanza dal generatore) che, nella propagazione
ideale del suono per divergenza sferica, è data da:
 1)
1)
dove:
Wac = potenza acustica emessa dal generatore ( si tratta di semovente navale: ess. Caccia Torpediniere )
R = distanza dal generatore in metri; dato R = 1m si ha: Ie = Wac / (4 π).
Il secondo rapporto è relativo alla pressione Ii incidente sulla base ricevente del sonar
passivo posta alla distanza R dal semovente:
 2)
2)
L'intensità acustica passa da Ie a Ii lungo la distanza R secondo l'attenuazione Att, dovuta
alla divergenza sferica, che è data dal rapporto Ie/Ii come mostra la 3):
 3)
3)
La 3) trasformata, per semplicità di calcolo, in termini logaritmici ( decibel ) vede il simbolo Att
assumere la forma TL secondo la 4:
 4)
4)
Nella 4) il valore di R è espresso in metri; se nella 3) la distanza R è espressa in Km la 3)
diventa:
Att = (1000 R) 2 e la 4) assume la forma:
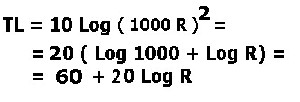 5)
5)
che rappresenta il primo e il secondo addendo della 001).
Nella propagazione del suono in mare una seconda causa d'attenuazione è dovuta all'assorbimento
dell'energia acustica da parte del mezzo di trasmissione.
Questa attenuazione, funzione della frequenza è stata studiata da Thorp e definita dalla formula:
 6)
6)
Nella 6) la frequenza fo è espressa in KHz ed "a" ha dimensioni logaritmiche espresse
in dB / Km. L'attenuazione per assorbimento per la distanza R è quindi:
Att(ass) = a R
che rappresenta il terzo addendo della 001)
Con la 001) si computa quindi l'attenuazione del rumore emesso dal semovente nel percorrere
la distanza R tra questo e il sonar.
L'equazione logaritmica 002) espressa in dB, TL = SL + DI - NL - DT + 10 Log (BW), è relativa
alla massima attenuazione del rumore emesso dal bersaglio accettabile in determinate
condizioni operative.
Una volta che la 002) abbia lo stesso valore della 001) saranno soddisfatte le condizioni
di scoperta del bersaglio secondo l'impostazione del sonar stabilita al momento contingente.
Il legame tra queste nuove grandezze è relativo al calcolo dell'attenuazione massima "tl" dalla
quale discende il TL della 002), il "tl" è esprimibile con la seguente funzione di variabili lineari:
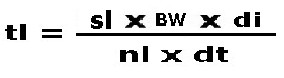 7)
7)
nella quale il significato dei simboli è:
"tl" = massima attenuazione sostenibile dal rumore emesso dal semovente navale
"sl" = livello di pressione emesso dalla sorgente acustica (semovente) in microPascal (μPa),
in regime di propagazione sferica e valutato ad un metro di distanza dal
generatore
"BW" = larghezza di banda del ricevitore sonar in Hz
"di" = guadagno della base idrofonica ricevente, adimensionale
"nl" = livello del rumore del mare, espresso in microPascal (μPa), nell'intorno della base ricevente
"dt" = soglia di rivelazione del sonar in numero adimensionale
l calcolo di "tl" è volto a stabilire la massima attenuazione sostenibile dall'energia acustica
emessa dal semovente con le variabili indicate nell'equazione data.
- Maggiore sarà il valore di "sl" (pressione acustica generata dal semovente) più elevata
sarà la portata di scoperta
- Maggiore sarà il valore di "BW" ( banda di ricezione) maggiore sarà la portata di scoperta
- Maggiore sarà il valore del "di" (guadagno della base ricevente) più elevata sarà la
portata di scoperta
- Maggiore sarà il valore del "nl" (livello del rumore del mare) minore sarà la portata di scoperta
- Maggiore sarà il valore di "dt" ( soglia di rivelazione) minore sarà la portata di scoperta
Vediamo come si computano le variabili citate:
-Livello di "li"
Per "li" si assume, ad esempio, come sorgente acustica un Caccia che navighi a
20 nodi che , alla frequenza f = 1700 Hz, generi
"li" = 10 x 1013 μPa (si veda p42)
-Larghezza di banda del ricevitore "BW"
f1 = 1000 Hz; f2 = 3000 Hz ; BW = 2000 Hz
-Calcolo del "di"
Il valore del "di" per base equivalente piana è dato da:
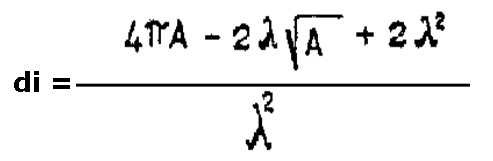 8)
8)
dove:
A = superficie della base in mq
λ = 1530 / f
nel caso che siano A = 2 mq ; f = 1700 Hz si ha "di" = 60
-Calcolo di "nl"
Per il calcolo di "nl" si assume uno stato del mare SS = 4 a 1700 Hz al quale corrisponde:
"nl" = 2 x 106 μPa (si veda p42)
-Calcolo di "dt"
Il valore del "dt" si calcola con l'espressione:
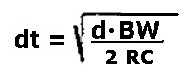 9)
9)
dove:
d = coefficiente legato a Priv. e Pfa. ( si veda p 84 )
BW = banda di ricezione del sonar
RC = costante di tempo d'integrazione
Nel caso in esempio: per d = 9; BW = 2000 Hz; RC = 1 Sec. si ha dt = 95
7)
scriviamo quindi la relazione che vogliamo tra le due funzioni:
 10)
10)
se svolgiamo il calcolo logaritmico della 10) otteniamo:
TL = 10 Log tl = SL + 10Log BW + DI - NL - DT = 10 Log [(sl x Bw x di) / (nl x dt)] =
= 10 Log (sl) + 10 Log (BW) + 10 Log (di) - 10 Log (nl) - 10 Log (dt) =
= 10 Log ( 10 x 1013 ) + 10 Log (2000) + 10 Log (60) - 10 Log (2 x 106) - 10 Log (95)=
= 140 dB + 33 dB + 17.8 dB - 63 dB - 19.8 dB = 108 dB