SONAR-INFO-p222
Sonar FALCON Tracking
La funzione d'inseguimento automatico dei bersagli
1) Generalità 2) Le memorie video e l'indice di collimazione del sonar FALCON 3)Il processo per l'inseguimento automatico
La funzione d'inseguimento dei bersagli consente di conoscere, istante dopo istante ed in modo
automatico, la posizione angolare degli stessi rispetto all'asse del sommergibile, ciò durante
le evoluzioni sia dei bersagli che di quest'ultimo.
Detta funzione, per il sonar FALCON, si realizza tramite software studiato nel contesto
di tutta la filosofia funzionale di questo particolare apparato.
La realizzazione dell'inseguimento automatico del FALCON è diversa dal sistema ad anello, basato sullo
zero della funzione CH(r) già visto in p218, e si sviluppa con criteri ritenuti più
idonei per questa soluzione software; si avvale pertanto della funzione C(r) e del suo massimo.
Vediamo ora come sono organizzate le funzioni operative per l'inseguimento automatico
dei semoventi navali implementate nella routine principale del FALCON; dette funzioni sono impostate
in VB6.
Le memorie video del FALCON, generate da un processo di correlazione multiplo ( 288 funzioni di correlazione ), sono organizzate
in matrici monodimensionali definite dalla stringa:
Private a(287) As Single
La matrice può essere scritta come: y = a(x); dove y è l'ordinata e x l'ascissa.
Questa matrice, opportunamente scandita, genera la presentazione video riportata in figura 1:
 Figura 1
Figura 1
In figura compaiono 288 righe (ordinate della matrice) disposte a 1.25° l'una dall'altra (ascisse
della matrice) fino a coprire tutto l'arco
dei 360° dell'orizzonte.
La collimazione manuale del tracciato di figura 1 è affidata ad uno Scroll orizzontale
che governa la variabile "t" dichiarata con la stringa:
Private t As Integer
-("t" variabile da 0 a 287)-
e la matrice indice :
Dim indi(287) As String
- ("indi" Variabile da 0 a 360° a passi di 1.25°)
Variando la posizione dello Scroll si posiziona un indice verticale luminoso con il quale
si esegue manualmente il puntamento del bersaglio così come mostra la figura 2:
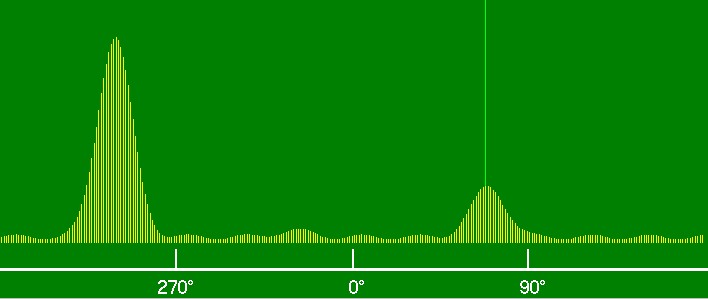 Figura 2
Figura 2
Il valore dell'angolo di collimazione è presentato su Label5 dalle stringhe:
t = HScroll1.Value
Label5.Caption = indi(t)
Con questa definizione angolare di 1.25° l'errore strumentale massimo è di 0.625°.
L'indice è posizionabile anche con un click del mouse nel punto desiderato.
Il processo, affidato ad una struttura software, segue il percorso:
Imposta la matrice "bb" ausiliaria alla matrice "a"
Dim bb(287) As Single
La matrice può essere scritta come: y1 = bb(x); dove y1 è l'ordinata e x l'ascissa.
Definisce due limiti angolari della posizione dell'indice "li" e "ls" in t-5 e t+5 (tra +/- 6.25°)
li = t - 5
ls = t + 5
copia i valori della matrice "a", compresi nell'intervallo li-ls, in "bb"
For X = li To ls
bb(X) = 5 - a(X)
Next X
Imposta due anelli For "nidificati" per la ricerca del msasimo nell'intervallo +/- 6.25° attorno a "t"
For X = li To ls
For I = li To ls
If bb(X) = bb(I) Then bb(X) = bb(X) * 1.01
'se sono presenti due bb(x)
'dello stesso livello ne aumenta uno dell' 1 % in
'modo da evitare che l'anello successivo oscilli
'nella determinazione tra due valori di bb(X)>0
If bb(X) < bb(I) Then bb(X) = 0 'seleziona il bb(X) più grande
Next I
Next X
Una volta selezionato il valore più grande di bb(X), si assegna allo scroll l'ascissa X
di y1 = bb(x) che posiziona "t" sul massimo di C(r) di "a"
For X = li To ls
If bb(X) > 0 Then HScroll1.Value = X
Next X
Il processo si ripete in continuità, passo dopo passo, in funzione dell'evoluzioni
del bersaglio lungo l'arco dell'orizzonte dato che
la matrice y = a(x) viene aggiornata dopo ogni scansione e con essa la ripetizione della
la sequenza sopra illustrata.
Dato che la C(r) è ottenuta tramite un algoritmo di correlazione la sua velocità di assestamento
sul massimo sarà subordinata alla costante di tempo del correlatore; per costanti di
tempo piccole il sistema d'inseguimento sarà veloce, quindi adatto a bersagli ad elevata dinamica
di spostamento pagando il prezzo di un modesto guadagno sul rapporto segnale/disturbo.
Per costanti di tempo elevate, tali da ottimizzare il rapporto segnale/disturbo la velocità
di assestamento della C(r) sul massimo sarà bassa e di conseguenza adatta soltanto per
bersagli in lento movimento.
Per ottimizzare le condizioni d'inseguimento automatico del bersaglio il sonar FALCON è
dotato di comando atto alla scelta della costante di tempo su tutte le 288 routine di
correlazione così come mostra, assieme a tutte le funzioni menzionate in precedenza, la figura 3:
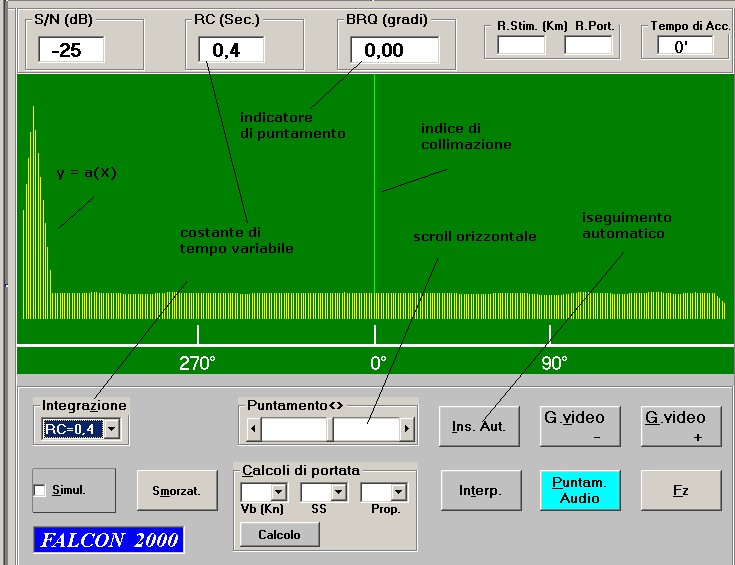 Figura 3
Figura 3
Le routine sopra illustrate sono avviate da apposito pulsante virtuale "Ins.Aut" una volta puntato l'indice
con lo scroll o con il click del mouse attorno al massimo del bersaglio
scelto per l'inseguimento.