SONAR-INFO-p246
La base conforme del sommergibile Sauro
Le due componenti di scoperta
1)Generalità 2)Sulla sistemazione meccanica della base conforme 3)Le due componenti di scoperta
In alcune conferenze tenute dallo scrivente, che trattavano in modo discorsivo del Sonar nella
navigazione del sottomarino Sauro, si è accennato ai sistemi direttivi collegati alla base
conforme della quale se ne mostrava una piccola porzione così come sui vede in figura 1.
In questa pagina vogliamo andare a fondo della complessa problematica relativa alle componenti di
scoperta delle quali la base conforme è il caposaldo; la descrizione sarà in presente storico.
 figura 1
figura 1
La base conforme, costituita da 46 idrofoni a stecca, vedi figura 2 in baso a sinistra,
è sistemata sotto il falso scafo del Sauro così come riportato nella siluette della stessa figura.
 figura 2
figura 2
Posteriormente allo schieramento delle stecche idrofoniche sono disposti dei pannelli per l'isolamento
acustico verso l'interno del sottomarino.
Della base conforme vista in pianta se ne può vedere una metà in figura 3, dall'idrofono 1
'idrofono 23, la seconda metà, dall'idrofono 24 all'idrofono 46, è perfettamente simmetrica alla
prima.
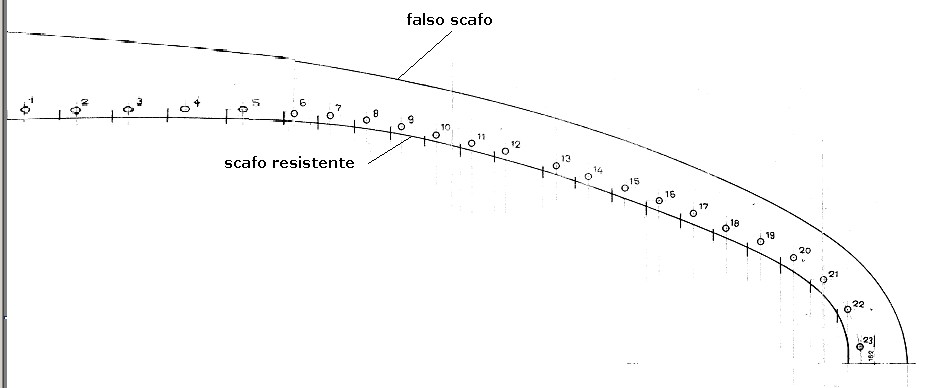 figura 3
figura 3
Una vista di prospetto della base è riportata in figura 4
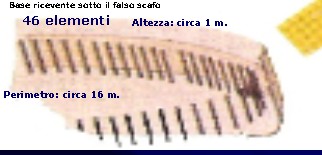 figura 4
figura 4
Le due componenti per la scoperta dei bersagli idrofonici sono:
*** Componente a comando manuale realizzata tramite il compensatore di figura 5 ( si veda p234 );
questa consente la ricerca delle
sorgenti acustiche su 360° con elevata precisione di puntamento angolare.
Il sistema interfaccia con l'operatore tramite tre canali: canale audio, canale analogico con indicatore
di livello,
canale in correlazione con indicatore del rapporto S/N d'ingresso.
In questa componente si utilizzano, per direzioni al traverso, 22 idrofoni per ciascun lato
del battello.
Il campo di lavoro si estende in un ampio spettro delle frequenze basse.
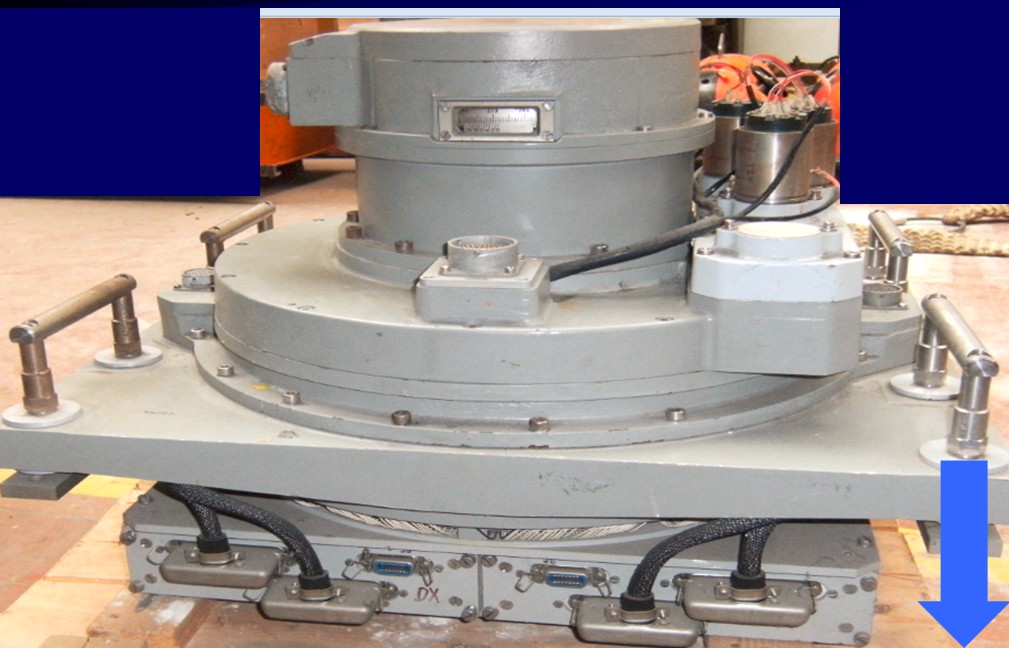 figura 5
figura 5
***Componente a fasci preformati realizzata con catene di ritardo ed elettronica integrata.
L'interfaccia con l'operatore si concretizza tramite lo schermo della consolle di comando e controllo mostrata in
figura 6; La presentazione è del tipo a cascata e dipende da un sistema multiplo di correlazione
che lavora in banda larga.
 figura 6
figura 6
4)Le direttività della componente a compensatore
Il calcolo delle direttività del compensatore è stato fatto inserendo nel computer le
coordinate di 22 idrofoni al traverso ( dal n° 1 al n° 22 ) e le bande delle frequenze
di lavoro, tracciando, ad ogni intervallo
di 10°, le curve di direttività tenendo di conto il numero degli idrofoni selezionati dal compensatore direzione per direzione.
Le curve di direttività teoriche sono state tracciate sia per il canale dell'indicatore, sia per
il canale in correlazione; le prime, al traverso, per il canale dell'indicatore sono mostrate
in figura 7:
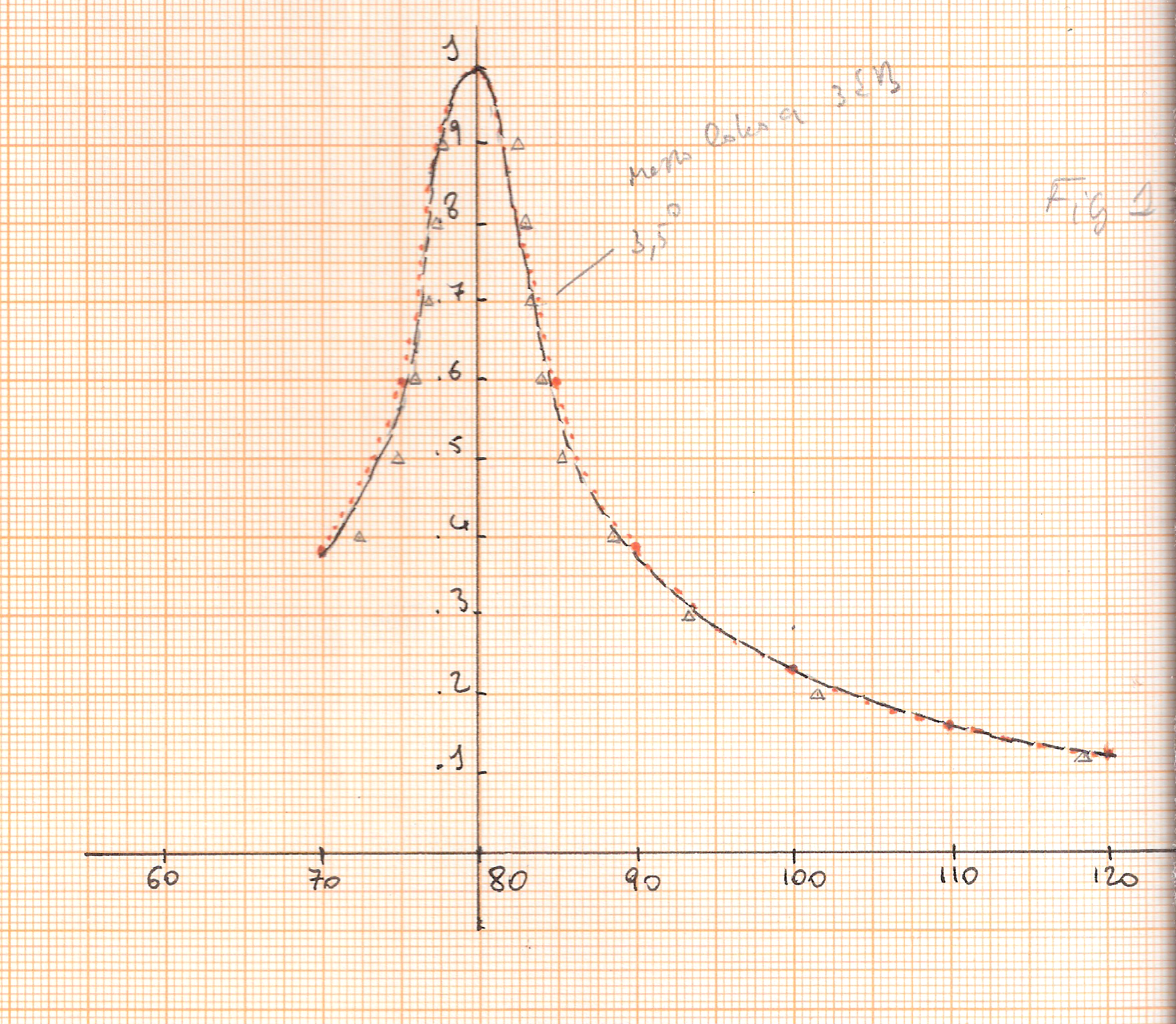 figura 7
figura 7
In figura a tratto nero è mostrata la curva di direttività teorica nella banda di frequenze mediane
calcolata al traverso, con crocette rosse il risultato del controllo di laboratorio sul
compensatore.
L'ampiezza del lobo principale è di +/- 3.5° a - 3dB .
Per la banda di frequenze più alte è stata calcolata la direttività in correlazione così
come mostra, sempre al traverso, la figura 8.
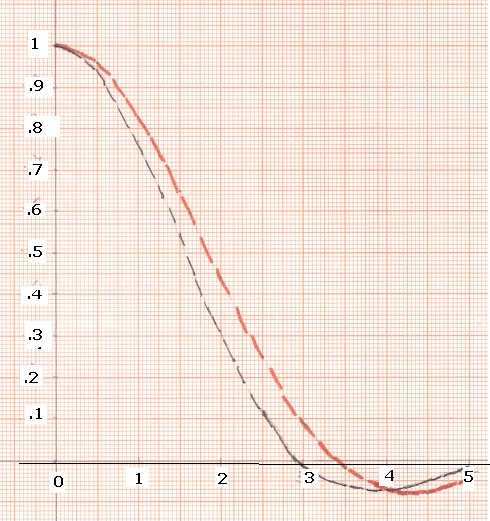 figura 8
figura 8
La curva a tratto nero è il risultato dei calcoli al P.C. con le coordinate di 22 idrofoni,
la curva rossa è ottenuta con la proiezione del profilo conforme su di una retta così
come illustrato in p39; la comparazione si è resa necessaria, prudentemente, per la validazione
della complessità dei calcoli al computer.
Si osservi come il lobo sia molto stretto, circa +/- 1° a -3dB , cosa ottima per la precisione del
compensatore ma tale da creare, come vedremo, alcuni problemi alla componente a fasci preformati.
5)Le direttività della componente a a fasci preformati
La struttura di un sistema per la realizzazione di un insieme a fasci preformati è stata
ampiamente illustrata alla pagina p94, in questa sede non resta che determinarne il
numero secondo quanto mostrato a pagina p152 facendo riferimento alla curva di direttività
in correlazione di figura 9:
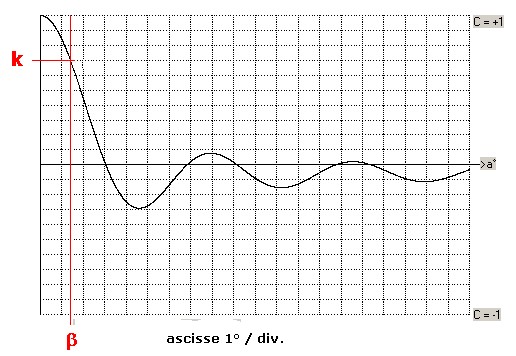 figura 9
figura 9
La curva è stata calcolata nella banda dedicata ai fasci preformati considerando
come base idrofonica la proiezione della conforme su di una retta come mostrato in figura 10,
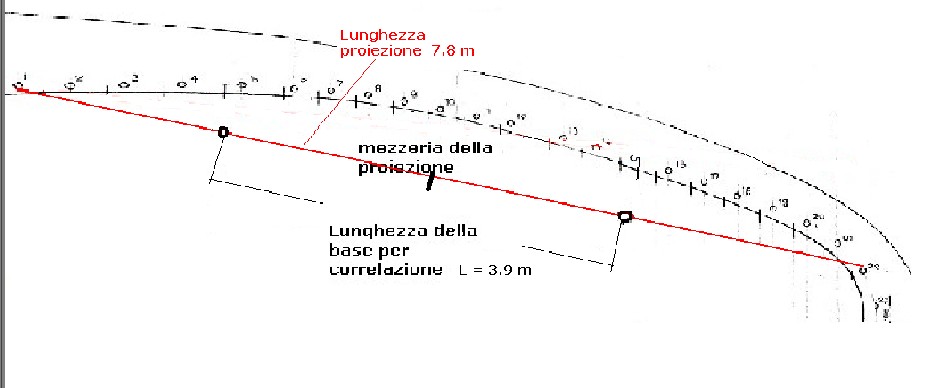 figura 10
figura 10
I calcoli per le direttività in correlazione della proiezione della base conforme devono
essere sviluppati assumendo come lunghezza virtuale L' della base quella che unisce i punti
di mezzo delle due metà.
La lunghezza della base proiettata messa a calcolo per la direttività in correlazione è
di L ∼ 3.9 metri.
Possiamo ora, secondo l'algoritmo generale di p152, sviluppare il calcolo del numero dei fasci
preformati scrivendo:
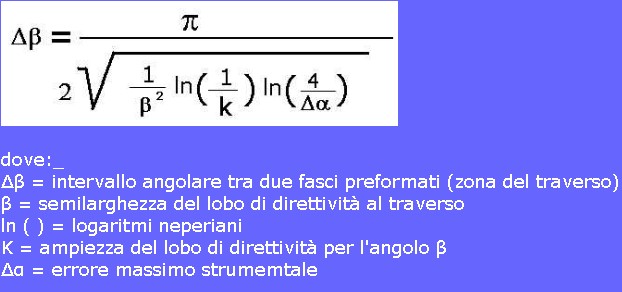
Applicando la formula secondo i valori emersi da figura 9:
per β = 1.4° si ha K = 0.7; accettando un errore di puntamento Δα = 1°
si ha Δβ = 3.1°.
Dato che per ragioni costruttive i fasci devono essere ditanziati di un numero
di gradi intero il valore di Δβ deve essere arrotondato al valore intero più prossimo: Δβ' = 3°.
questa dovrebbe essere la distanza tra due fasci adiacenti.
Secondo Δβ' = 3° , dovendo coprire 360° d'orizzonte,
sarebbero necessari n = 360/3 = 120 fasci.
Data la tecnologia del momento il numero dei fasci emersi dal calcolo crea un insormontabile
ostacolo a bordo date le limitate dimensioni disponibili nel locale A.S.
Ecco quindi che la lunghezza della base conforme, che genera una curva di direttività
molto buona, è eccessiva per il rapporto tra numero fasci e volume disponibile a bordo.
Non resta quindi che determinare il massimo numero di fasci "n", in rapporto ai volumi disponibili,
dal quale fare discendere il valore di β con il quale stabilire la nuova lunghezza
della base conforme.
Assumiamo quindi un numero n di fasci superiore alla metà del precedente contando in una riduzione di
volume di al meno da 1 a 0.5:
Assunto quindi n = 72 ( in vece di 120 ), pari ad un fascio ogni 5°; (Δβ = 5°), vediamo come
calcolare il corrispondente valore di β.
Dell'algoritmo per il calcolo di Δβ ricaviamo β come funzione di Δβ
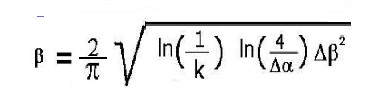
Con la nuova espressione per Δβ = 5° si ha : β = 2.2 °.
Si tratta ora di stabilire la lunghezza L' della base tale che il lobo principale abbia
per β = 2.2° , k = 0.7.
Da computazioni iterative svolte con il calcolatore delle funzioni di correlazione, disponibile
a pagina p117, si trova la direttività
di figura 11 ottenuta pel L' = 2.5 m:
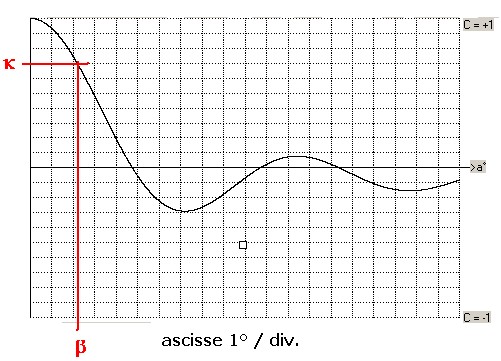 figura 11
figura 11
Il risultato mostra che, per ridurre gli ingombri del sistema, la lunghezza di L = 3.9 m,
della base virtuale, deve essere portata a L' = 2.5 m;
La riduzione della lunghezza della base virtuale equivale all'impiego di un numero
inferiore d'idrofoni che devono concorrere alla composizione del fascio preformato:
Ne segue che si devono ridurre il numero degli idrofoni, per i soli fasci preformati , nel rapporto L' / L = 0.636
si deve passare quindi da n = 22 a n' = 22 * 0.636 = 14.
6)Osservazioni
Come si è visto le prestazioni del sonar sono subordinate alle caratteristiche
del battello; la base conforme è utilizzata completamente per la componente a compensatore,
mentre la componente a fasci preformati la utilizza solo in parte.
Si ha perciò con il compensatore un guadagno di direttività superiore a quello
ottenuto con il sistema a fasci preformati.
Questa è una delle molteplici limitazioni alle capacità del sonar dipendenti dal fatto
che il battello non nasce in funzione del sonar ma viceversa è quest'ultimo che deve
sacrificare le proprie capacità di scoperta in dipendenza di scelte fatte da
altri progettisti.