SONAR-INFO-p256
Sulle limitazioni del differenziale di riconscimento 1) Generalità' 2)Sulla definizione sintetica dei termini "Differenziale di Riconoscimento" (da p108) 3)Sulla funzione che governa il processo di correlazione a due stati 4) La varianza nei processi di correlazione a due stati 5) Adattamento ordinate di figura 1 per confronti con figura 2 6) Comparazione livelli C(si/ni) con Vr di picco 7)Esame del problema in termini numerici
-segnali a due stati-
In tutte le pagine del sito che, direttamente o indirettamente, trattano del differenziale di riconoscimento,
afferente
ai sistemi di rivelazione in correlazione per segnali a due stati, non si è mai accennato a valori inferiori a
-18; -20 dB ; cercheremo in questa pagina di capire qual'è l'origine di tale limitazione.
Questa, come vedremo, è intrinseca nelle funzioni matematiche che definiscono i processi di
correlazione dei segnali a due stati subordinati poi alle velocità di spostamento dei mezzi navali.
Il Differenziale di Riconoscimento Δ, espresso in dB, è il minimo
rapporto S/N con il quale un sonar può rivelare la presenza del bersaglio mascherato dal rumore.
Secondo le convenzioni il differenziale di riconoscimento che caratterizza un rivelatore è il minimo valore
Δ per il quale si abbia:
Probabilità di falso allarme P(FA) = 10 %
Probabilità di rivelazione P(D) = 50 %
Per discutere sulle limitazioni di cui al titolo si ripropone, come si è già mostrato in molte pagine del sito,
la funzione caratteristica che esprime come
varia l'ampiezza del livello di correlazione in funzione del rapporto Si/Ni, questa è:
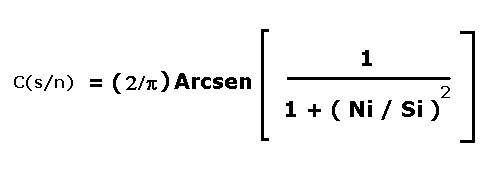 1)
1)
La 1), calcolata per Si/Ni variabile da -60 dB a + 60 dB, e riportata in figura 1 in forma normalizzata:
Le scale sono:
ascisse: ( si/ni ) in dB ; 6 dB/div.
ordinate C(si/ni) , adimensionali; 0.1 /div.
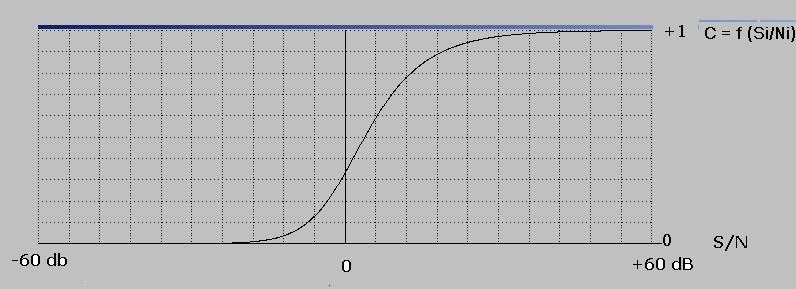 figura 1
figura 1
Sempre al fine di chiarire le ragioni delle limitazioni sui valori del differenziale di riconoscimento vediamo
ora la funzione Vr che mostra l'andamento della varianza all'uscita ( quota di rumore ) di un sistema di correlazione, per segnali
a due stati; Vr dipende da due variabili:
RC ( costante di tempo d'integrazione )
BW ( banda dei segnali da correlare ),
l'espressione analitica è la seguente:
 2)
2)
Il valore di Vr è espresso in volt efficaci rapportato al massimo normalizzato della 1).
Le scale sono:
ascisse: ( Vr max = 0.02 ); 0.002/div.
ordinate ( RC ), da 0.1 a 10 Sec. 0.5 Sec./div.
 figura 2
figura 2
Questa curva esprime Vr in valori di picco e non in valori efficaci come indicato dalla 2) dato che
su tali livelli si deve poi comparare con la C(si/ni).
Per confrontare le due funzioni; C(si/ni) e Vr si traccia la curva C(s/n) di figura 1 con la stessa scala
delle ordinate di figura 2 come mostra figura 3:
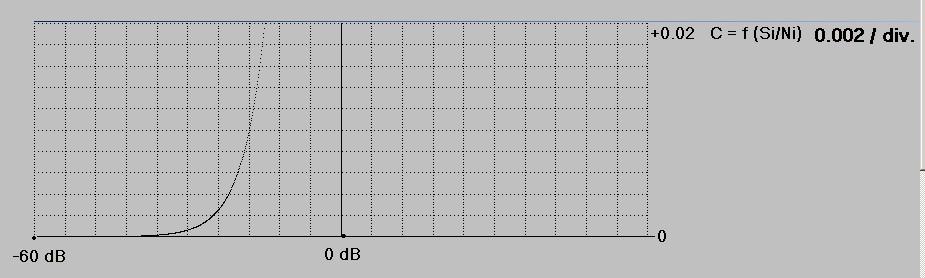 figura 3
figura 3
Le scale sono:
ascisse: ( si/ni ) in dB da 0 a -60 dB ; 6 dB/div.
ordinate C(si/ni) , max = 0 .02 adimensionali; 0.002 /div.
Per l'analisi delle limitazioni al titolo tracciamo ora un grafico che contiene le due curve rispettivamente di
figura 2 e 3; la figura 4; questo grafico ha il solo scopo di orientare il lettore sul fatto che, anche
se in modo non rigoroso, si mette già in evidenza la problematica affrontata in questa pagina :
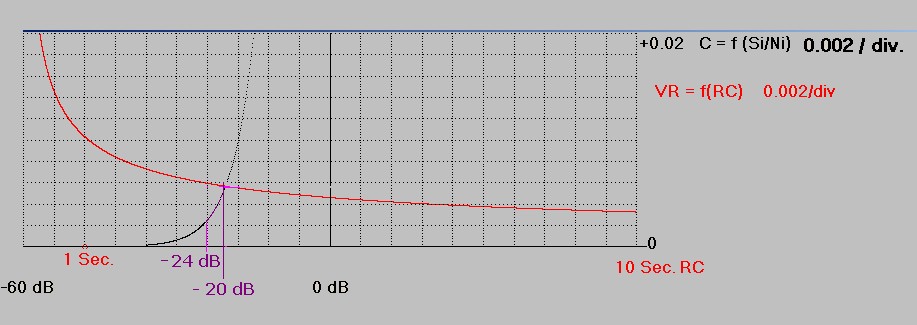 figura 4
figura 4
dalla figura 4 si vede infatti che la C(si/ni) ,nell'intervallo compreso tra -20 e -24 dB, ha ampiezze dell'ordine della
Vr; quindi grandi differenze a favore della C(si/ni) per rapporti si/ni < -20 dB, non ce ne sono, salvo per valori
molto grandi di RC.
Un modo rigoroso per esaminare le limitazioni sul differenziale di riconoscimento consiste nell'esame della
variazione del rapporto si/ni secondo la funzione 3), che esprime come varia il parametro "d" in funzione di si/ni.
Dalla 3) si ricava la 4) per si/ni funzione di rc per "d" e bw costanti.
Dal computo della 4), per d = 1.6 e bw = 6000 Hz costanti ( dedotto dal calcolatore curve ROC di p80
secondo la definizione del paragrafo 1) - Priv = 50 % ; Pfa = 10 %- ) abbiamo la curva di figura 6 con
si/ni funzione di rc variabile da 1 a 10 Sec:
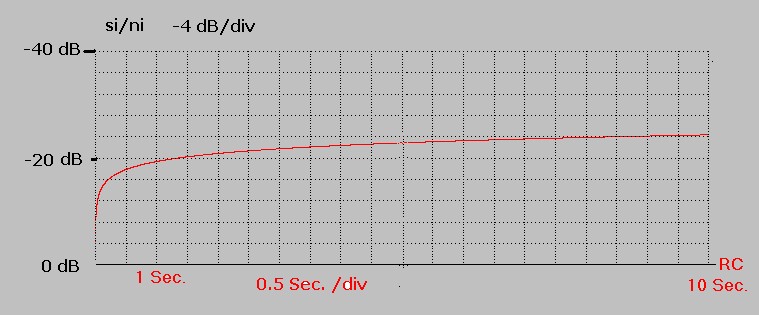 figura 5
figura 5
Dalla figura 5 si vede che per ottenere rapporti si/ni dell'ordine dei -24 dB è necessaria una costante di tempo
di rc = 10 Sec; dalla pendenza della curva s'intuisce che ulteriori incrementi del valore di rc portano
a irrilevanti miglioramenti del differenziale di riconoscimento.
Un valore di rc di 10 Sec. potrebbe andare bene per situazioni di correlazione tra segnali generati da una
sorgente praticamente immobile; nel caso del sonar a fasci preformati che deve seguire le evoluzioni di un bersaglio
possono valere le seguenti considerazioni:
Supponiamo che un CT navighi a a 30 nodi alla distanza di 10000 m da un sommergibile in fase di scoperta sonar.
Se il sommergibile è in fase di accostamento rapido, ad esempio di
4°/Sec, ed è dotato di un sistema a fasci preformati in correlazione, 72 fasci su 360° (un fascio ogni 5°),
il segnale correlato passerà dall'uscita di un correlatore all'uscita di quello contiguo in 1.25 Sec. i correlatori
pertanto dovranno avere una risposta di assestamento nell'ordine di 1 Sec. corrispondenti, in base a figura 5, ad un
differenziale di riconoscimento limitato a circa -19 dB.
I dati emersi nei paragrafi 6) e 7) illustrano quindi le limitazioni al differenziale di riconoscimento; limitazioni
dovute in parte alle funzioni matematiche che governano il fenomeno e in parte all'impiego dei correlatori
in situazioni relative a bersagli mobili.