SONAR-INFO-p39dsc
DIRETTIVITA DELLE BASI IDROFONICHE
ESPOSIZIONE IN TERMINI GRAFICO DISCORSIVI
1) INTRODUZIONE 2) Disegni di massima e fotografie di un sistema acustico 3) Geometria di ricezione del sistema acustico 4) La direttività della base acustica ed il numero degli idrofoni 5) Un eseguibile d'esercitazione
La caratteristica di direttività di un sistema acustico indica come varia la sensibilità
di ricezione con il variare della direzione di provenienza dell'onda sonora.
Se la sensibilità è la massima possibile in una direzione e diminuisce molto rapidamente con il
variare di essa si dice che la base ricevente ha una buona direttività, cioè presenta una
direzione preferenziale d'ascolto.
La direttività di un gruppo di sensori, ottenuta sommando i contributi
di tensione generati dai singoli idrofoni opportunamente ritardati, è governata da leggi matematiche che
consentono di calcolare l'andamento della loro somma in funzione di diverse variabili.
In questa pagina tratteremo l'argomento in semplici termini grafico discorsivi rimandando il lettore
interessato alle problematiche teoriche alla pagina p39 dove le stesse hanno un ampio sviluppo.
In figura 1 è mostrata in pianta la composizione di un sistema acustico ricevente disposta
secondo il profilo dello scafo di un sommergibile, questa geometria è detta a "Base conforme":
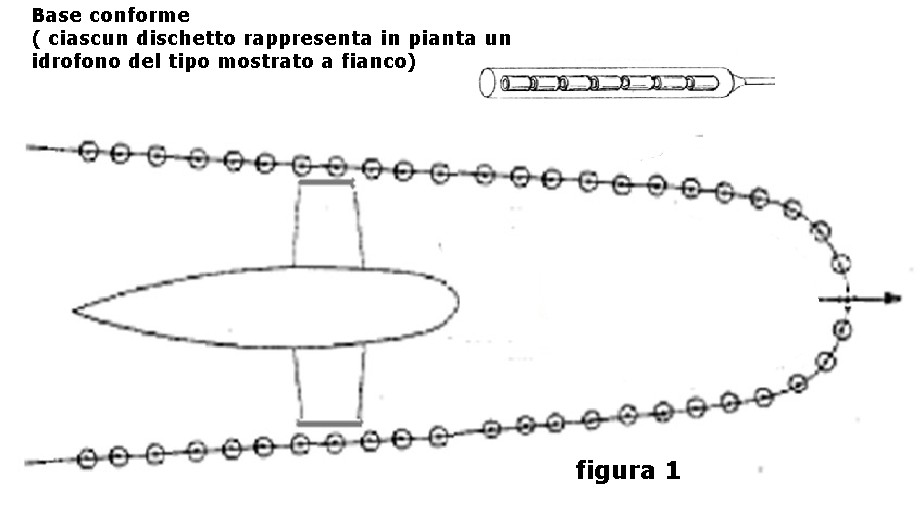
Il singolo idrofono disegnato in alto a destra di figura 1 è mostrato in fotografia dal vero in
figura 2:
 figura 2
figura 2
La disposizione dei singoli idrofoni vista in prospettiva è mostrata il figura 3:
 figura 3
figura 3
La stessa disposizione di figura 3 è mostrata nel contesto dello scafo del sommergibile
nella siluette di figura 4:
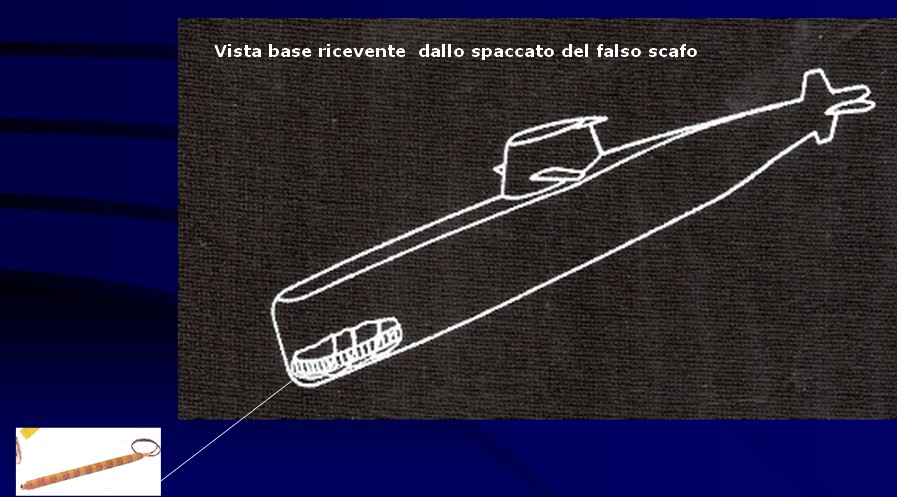 figura 4
figura 4
Ed in ultimo la fotografia di figura 5 che mostra una parte del sistema acustico montata
sullo scafo resistente del sommergibile:
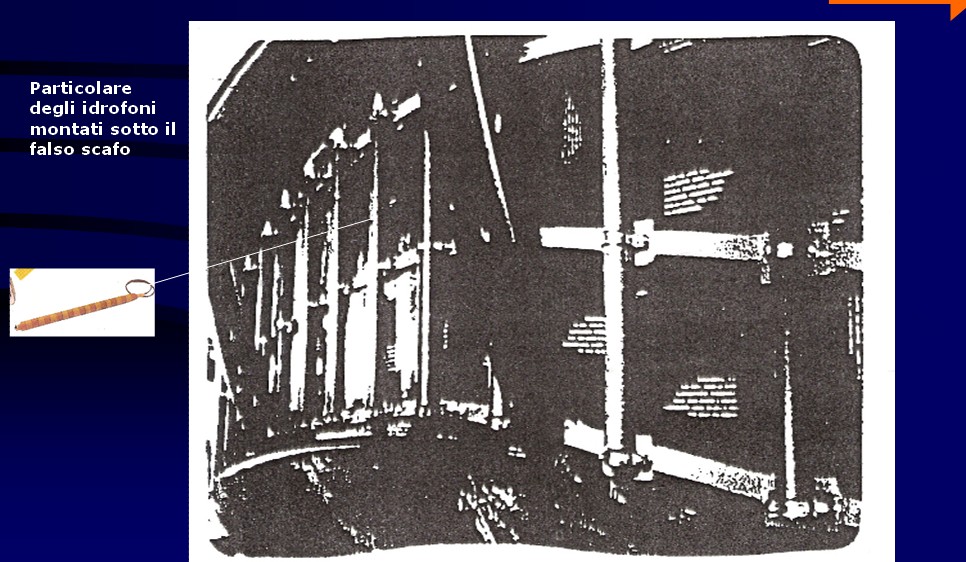 figura 5
figura 5
Quando il suono emesso dal bersaglio colpisce il sistema acustico mostrato in figura 5 si può
considerare la configurazione geometrica illustrata in figura 6:
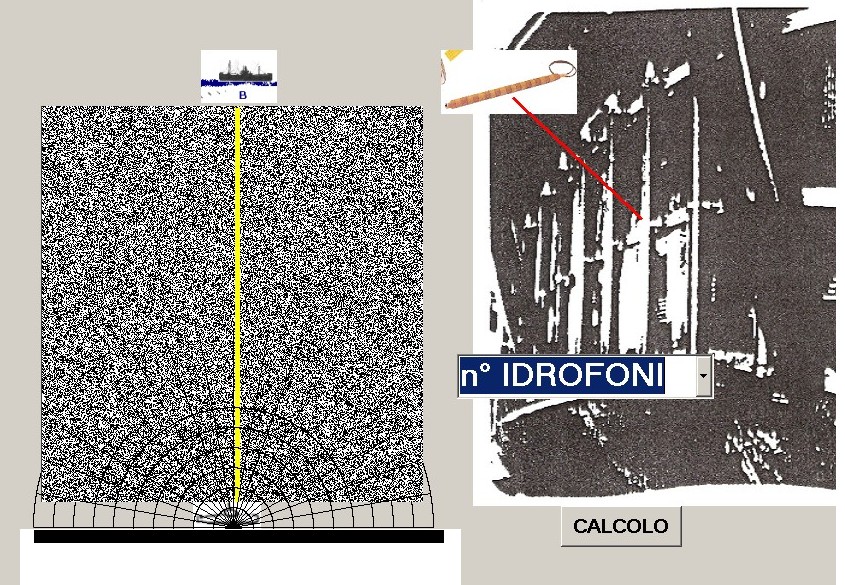 figura 6
figura 6
In essa si osserva:
-Un tracciato polare chiuso dalla parte bassa con una banda nera, banda che rappresenta
la schermatura dello scafo nei confronti dello schieramento dei sensori; questi possono
ricevere, in via teorica, soltanto i suoni che provengono dalla parte superiore della banda nera.
-Un bersaglio "B", posto in alto, ed il rumore da esso generato tracciato idealmente come
una riga gialla che unisce il bersaglio stesso con la base acustica.
-Un insieme di puntini neri che rappresentano il rumore del mare che avvolge tutto lo scafo
del sommergibile.
-Un comando di selezione numero dei sensori.
-Un pulsante di calcolo curve polari di direttività.
-Sulla destra, a memoria della struttura vera della base acustica, la fotografia già mostrata
in figura 5.
Per comprendere al meglio come la direttività di una base acustica dipenda, oltre ad alti
fattori, dal numero degli idrofoni impiegati nel processo di ricezione dei rumori emessi dai
bersagli esaminiamo le diverse soluzioni ottenibili partendo dalla figura 6:
Consideriamo la base acustica formata da 2 soli idrofoni, la figura 6 assumerà il profilo della
figura 7 nella quale si evidenzia in rosso un semicerchio a rappresentare che il settore di
mare che viene ascoltato in eguale modo interessa tutti 180° prospicienti alla base acustica.
Ciò significa che il rumore del bersaglio è ricevuto al massimo livello ma anche il rumore del mare
viene captato sui 180° al massimo livello; questa condizione penalizza di fatto la ricezione del
rumore emesso dal bersaglio che viene coperto dal rumore del mare.
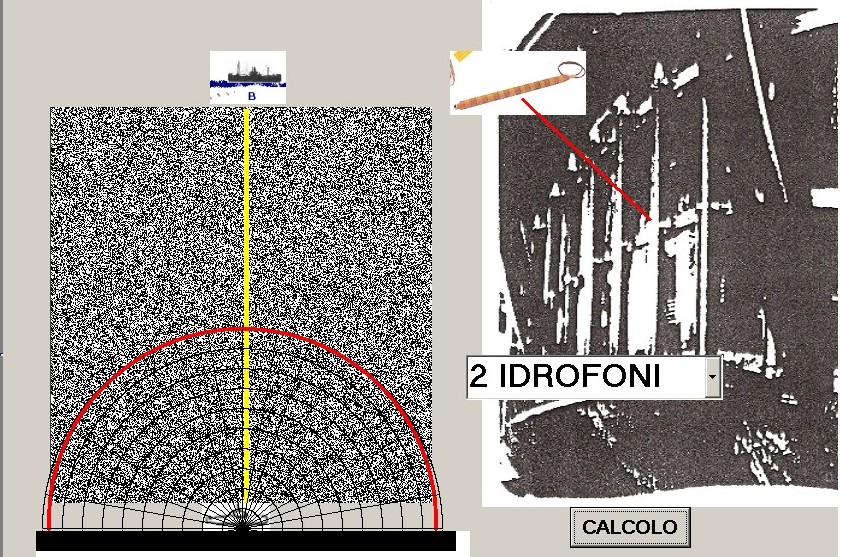 figura 7
figura 7
In virtù del miglioramento della caratteristica di direttività della base acustica con
l'incremento del numero degli idrofoni vediamo, in figura 8, quale vantaggio si ha, rispetto
alla figura 7, portando il numero dei sensori idrofonici da 2 a 4:
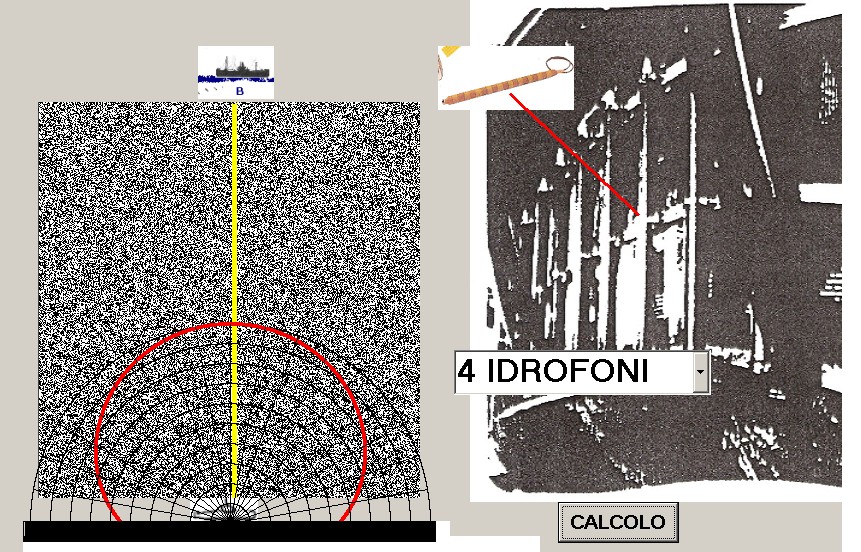 figura 8
figura 8
La figura mostra che l'ampiezza della curva rossa si riduce e il rumore del mare diminuisce,
l'arco rosso si chiude sensibilmente agli estremi del grafico; questo a vantaggio del rapporto tra il segnale
emesso dal bersaglio e il rumore del mare.
Proseguendo con l'incremento del numero degli idrofoni si computa la direttività per 8 sensori
ottenendo il grafico di figura 9 che mostra una sensibile riduzione d'ampiezza del tracciato
rosso non interessato dal segnale (segmento giallo):
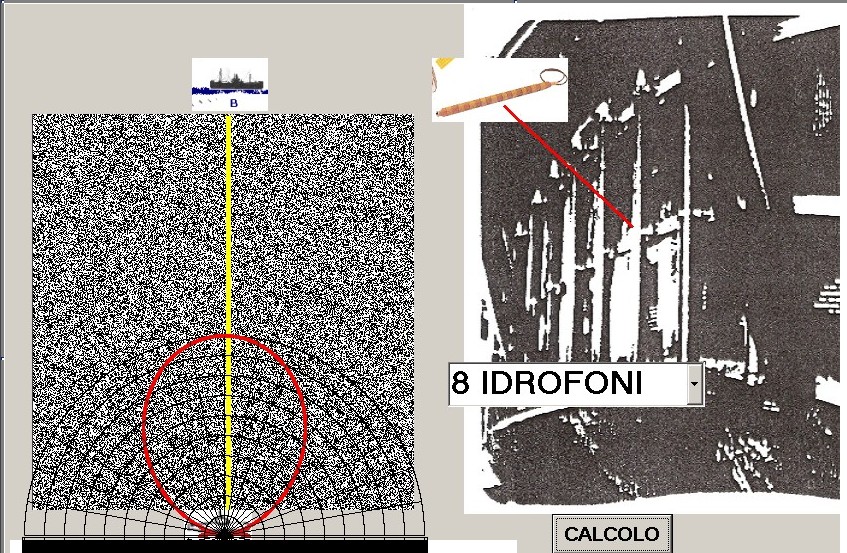 figura 9
figura 9
Incrementando ulteriormente il numero degli idrofoni, da 8 a 16 e da 16 a 32 si osserva una
progressiva riduzione dell'ampiezza dell'arco rosso, figure 10 e 11, con conseguente abbattimento del rumore
del mare in costanza d'ampiezza del segnale del bersaglio sotteso sempre al valore massimo
dell'arco rosso.
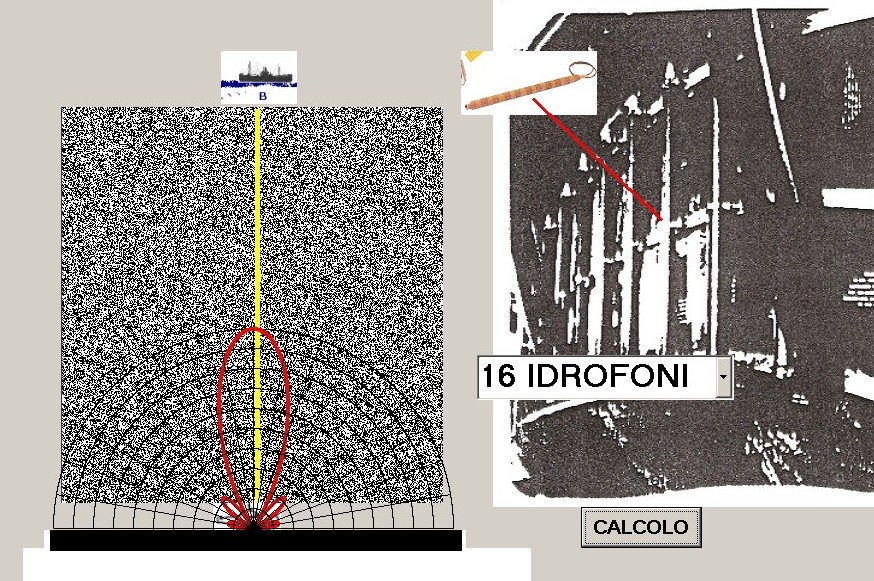 figura 10
figura 10
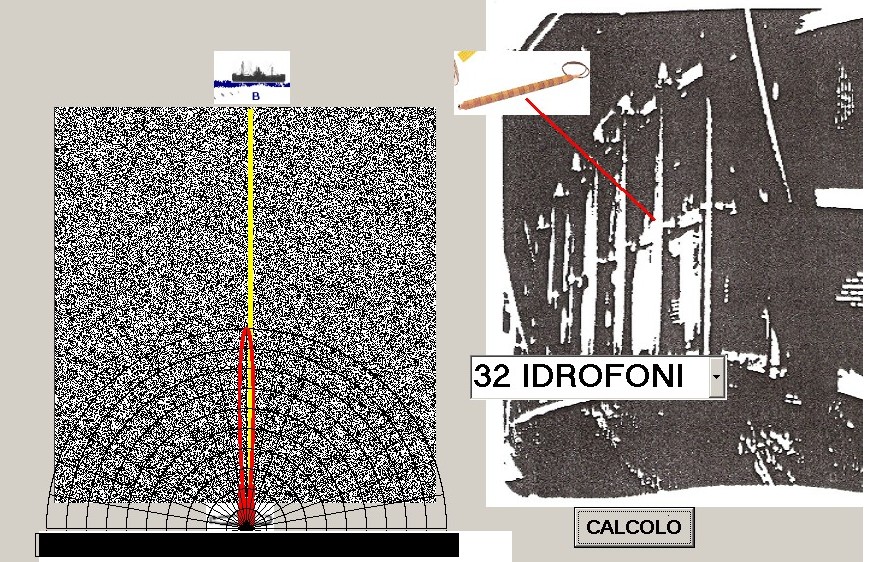 figura 11
figura 11
L'operazione eseguita non cancella completamente il rumore del mare visto che la riga gialla
del segnale è contornata sempre, nell'ambito del tracciato rosso, dal rumore del mare anche
se di modesta intensità.
Nelle figure 10 e 11 si evidenziano, alla base dei diagrammi rossi, dei piccoli lobi della
direttività detti "lobi secondari", questi incrementano di poco il rumore
del mare ma, in alcuni casi particolari, possono generare ambiguità nella determinazione
della direzione del bersaglio.
E' importante osservare come i diagrammi rossi, che definiscono la direttività della base,
siano tracciati nel piano orizzontale, rappresentano di fatto una sezione, in tale piano,
del cardioide mostrato in figura 12 che mostra la direttività in tutto lo spazio subacqueo:
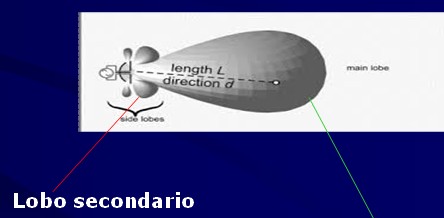 figura 12
figura 12
Al link Direttività è disponibile il file exe in grado di riprodurre le immagini della variazione
della direttività in funzione del numero degli idrofoni così come mostrato nelle figure
precedenti.
RICHIAMO ALL'INDICE==============>
Home