SONAR-INFO-p42
CALCOLO DELLE PORTATE DI SCOPERTA DEL SONAR PASSIVO
La conoscenza del tipo di propagazione, ottenuta con il tracciamento automatico delle traiettorie dei raggi sonori, che si verifica in una data zona e in un certo momento, consente all'operatore del sonar di eseguire dei calcoli per stabilire, con una certa approssimazione, quali sono le distanze massime alle quali può localizzare un bersaglio, sia con la componente passiva che con quella attiva (previsione delle portate operative).
Questo tipo di valutazione, che viene effettuato, per la prima volta, in sede di progetto del sonar per conoscere le massime prestazioni (vedi paragrafi 12.3 - 12.4), necessita di un certo numero di elementi che l'operatore trova su appositi tabulati. Tra questi elementi figurano i livelli dei disturbi dovuti all'ambiente subacqueo.
Ipotizzando una certa condizione dello stato del mare, si introducono nei calcoli dei valori che conducono alla determinazione delle portate di scoperta con le incertezze dovute alle ipotesi fatte. Con l'impiego di una speciale apparecchiatura, che capta i disturbi fuori dello scafo del battello, possono essere misurati dall'operatore gli effettivi livelli del disturbo ambiente. In tal modo vengono inseriti nei calcoli dei valori reali così da ottenere previsioni di portata più attendibili.
Con quest'ultima descrizione si comprende, una volta di più, la grande importanza che hanno le indagini sulla propagazione del suono nelle attività di localizzazione del sonar.
Ciò premesso in termini discorsivi vediamo come tradurlo in questa pagina in testo tecnico affrontando il problema
del calcolo numerico delle portate in modo analitico, calcolo che peraltro è eseguibile anche con
il SONORMATH di p6 ma in modo sintetico. 1) Il problema del percorso dei raggi acustici
2)Le variabili che sono necessarie ai fini dei calcoli 3)L'equazione del sonar passivo 4)Dettagli su alcune variabili di calcolo 5)Calcolo della portata -esempio grafico/numerico- 6)Commenti alla procedura
In merito al calcolo delle portate di scoperta sonar riportiamo integralmente quanto scritto
nel paragrafo 10.9 del testo in p2:
Nella figura che sotto riportiamo si vede una delle innumerevoli situazioni in cui il sonar
può trovarsi:
Il tracciato mostra, in questo specifico caso, la distribuzione della "zona d'ombra" , zona entro la quale, in via teorica,
non è possibile il transito delle onde acustiche.
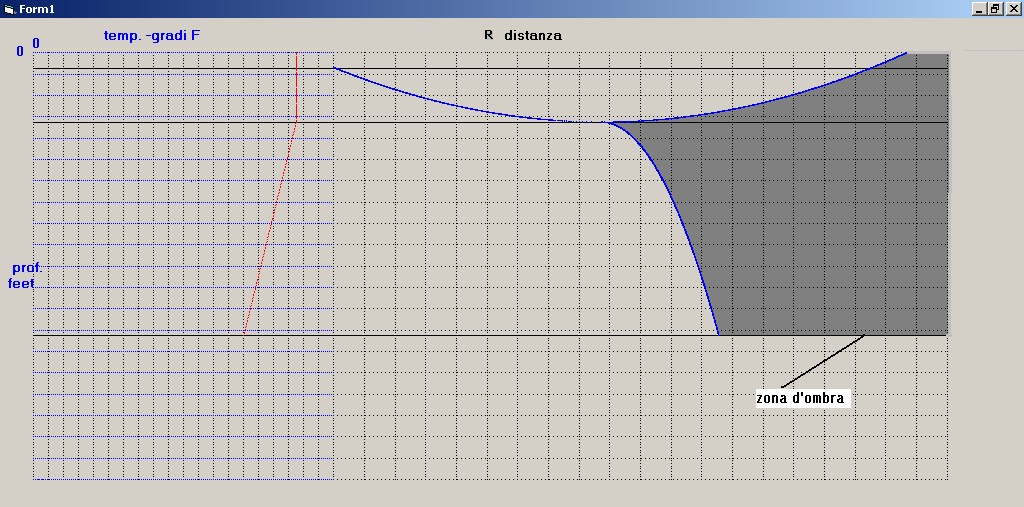
I calcoli della portata del sonar sono quindi validi purché il percorso sorgente-sonar non sia
compreso in zona d'ombra.
Elenchiamo di seguito, illustrandone la specificità, la serie delle variabili che consentono
i calcoli di previsione delle portate di scoperta del sonar passivo(dove s'indica ../Hz s'intende radice di Hz):
*F1 ; F2 = la banda delle frequenze di ricezione del sonar in Hz (ad es. tra 5000 Hz e 7000 Hz)
*fo = frequenza media geometrica nella banda ( ad es. V(5000 Hz x 7000 Hz)= 5916 Hz )
*SL = il rumore "spettrale" irradiato dal bersaglio in dB/microPascal/Hz (ad es. il rumore emesso
da un cacciatorpediniere navigante a 20 nodi alla frequenza di 6000 Hz è di 129 dB/microPascal/Hz)
*NL = il rumore "spettrale" dovuto allo stato del mare in dB/microPascal/Hz (ad es. il
rumore del mare a stato S = 4 "definito come mare agitato" alla frequenza di 6000 Hz è 54 dB/microPascal/Hz)
*DI = il guadagno di direttività della base idrofonica ricevente in dB
(ad es. 18 dB alla frequenza di 6000 Hz)
*RC = la costante di tempo di rivelazione del sistema video in Sec. (ad es. RC = 2 Sec.)
*d = il valore, in numero puro, legato alla probabilità di scoperta e falso allarme accettata
( ad es. per d = 9 si prevede il 90% di probabilità di scoperta e il 5% di falsi allarmi)
*Propagazione = ipotesi sul tipo di propagazione- "Sferica" o "Cilindrica" -(ad es. in acque poco
profonde si ipotizza prevalentemente la combinazione: sferica per i primi 1000 m e cilindrica oltre)
* R = variabile che caratterizza l'attenuazione del suono lungo il percorso in mare, espressa in Km
(ad es. da R= 0.1 Km a R = 20 Km )
*a = coefficiente d'attenuazione, in dB/Km, relativo alle caratteristiche di assorbimento del suono
nell'acqua in funzione della frequenza (ad es. per f = 11000 Hz a = 0,67 dB/Km )
* BW = banda di ricezione in Hz ( ad es. se f1 = 5000 Hz e F2 = 7000 Hz: BW = 2000 Hz )
* DT = soglia di rivelazione in correlazione in dB; dipende da "d" , BW e RC (ad es. può valere DT =16 dB)
*TL = variabile, espressa in dB, che indica la generica attenuazione del segnale
( ad es. TL = 80 dB può essere riferito sia all'attenuazione dovuta al percorso del suono, sia
all'attenuazione massima accettata in base ai parametri sopra elencati)
L'equazione del sonar passivo è una funzione matematica di quasi tutte le variabili indipendenti illustrate
nel paragrafo 2) ed è così espressa dalla 1):
1) TL = SL + DI - NL - DT + 10 Log BW
Il calcolo di TL è volto, in questo caso, a stabilire la massima attenuazione sostenibile del segnale acustico
con le variabili indicate nell'equazione data.
- Maggiore sarà il valore di SL (pressione acustica della sorgente) più elevata sarà la portata di scoperta
- Maggiore sarà il valore del DI (guadagno della base ricevente) più elevata sarà la portata di scoperta
- Maggiore sarà il valore del NL (livello del rumore del mare) minore sarà la portata di scoperta
- Maggiore sarà il valore di DT ( soglia di rivelazione) minore sarà la portata di scoperta
- Maggiore sarà il valore di BW (banda di ricezione) più elevata sarà la portata di scoperta
Stabilita l'attenuazione massima che il sonar può accettare per la rivelazione del bersaglio, in base
alle caratteristiche proprie e le condizioni esterne, si deve impostare una seconda equazione per il cacolo
dell'attenuazione che il suono subisce nel tratto di mare tra il bersaglio ed il sonar.
Dato che l'attenuazione del suono in mare dipende, sia dalla divergenza dei raggi, sia dall'assorbimento
delle onde acustiche in funzione della frequenza della sorgente, questa dipendenza è espressa
dall'equazione:
2) TL = 60 dB + 20 Log R + a R
Il TL in questo caso esprime la variazione (per divergenza e assorbimento) della pressione del segnale
acustico al variare della distanza R e del valore del coefficiente d'attenuazione "a".
Nella 2) è ipotizzata la propagazione sferica; il primo addendo, indicato in 60 dB, tiene conto del fatto
che la variabile R è espressa in Km invece che in mt.
Il secondo addendo è relativo all'attenuazione per divergenza per propagazione sferica, il terzo addendo, infine,
è relativo all'attenuazione per assorbimento in funzione di R e della frequenza ( tramite "a").
Il problema del calcolo è pertanto in questi termini: calcolata l'attenuazione massima sostenibile tramite
l'equazione 1) si cerca a quale distanza R il TL espresso dalla 2) eguaglia il TL della 1).
Matematicamente la cosa è resa complessa dal fatto che andrebbe risolta l'equazione trascendente in R:
60 dB + 20 Log R + a R -( SL + DI - NL - DT + 10 Log BW ) = 0
Il problema può essere risolto per via grafico-numerica come segue:
- si traccia una curva della 2) con in ascisse la variabile R ed in ordinate l'attenuazione TL in dB
- si traccia una retta parallela all'asse delle ascisse in base al calcolo della 1)
Il punto d'incontro delle due curve individua il valore di R e quindi la distanza di scoperta.
Nella lista delle variabili riportate nel paragrafo 2) due tra queste sono dipendenti da altre variabili
per cui richiedono una chiara esplicitazione; iniziamo con il coefficiente "a" definito come :
a = coefficiente d'attenuazione, in dB/Km, relativo alle caratteristiche di assorbimento del suono
nel mare.
Una delle formule più utilizzate per il calcolo di "a" è la seguente:
a = (0.1 fo²) / (1 + fo²) + (40 fo²) / ( 4100 + fo² ) + (2.75 fo²) / 10000
dove con fo s'intende la frequenza media geometrica della banda di ricezione espressa in KHz.
La seconda variabile che dipende da altre è:
DT = soglia di rivelazione in dB, dipende da "d", BW e da RC secondo la formula:
DT = 5 Log[ d BW / (2 RC) ]
Sulla scorta di quanto esposto in precedenza eseguiamo il calcolo delle prestazioni di un sonar
con caratteristiche proprie e condizioni esterne come sotto indicate:
F1 ; F2 estremi di banda delle frequenze di ricezione: F1 = 1000 Hz; F2 = 3000 Hz
fo frequenza media geometrica nella banda: fo = 1.7 KHz
SL s'ipotizza come sorgente del segnale un cacciatorpediniere di vecchia generazione
che naviga a 20 nodi; dai tabulati in letteratura, per fo = 1.7 KHz, si ha:
SL = 140 db/microPascal/Hz
NL s'ipotizza il mare a forza 2; dai tabulati in letteratura, per fo = 1.7 KHz, si ha:
NL = 58 dB/microPascal/Hz
DI si assume un guadagno di direttività della base ricevente di: DI = 10 dB
RC si pone a calcolo una costante di tempo d'integrazione di: RC = 0.1 Sec.
d si stabilisce di avere una probabilità di scoperta del 90% con una probabilità di falso
allarme del 5%; dalle curve ROC (si veda p5-Cap.4-par.4.6.1) si ha : d = 9
Propagazione s'ipotizza di operare a quote profonde con: propagazione sferica
BW la larghezza di banda del ricevitore è: BW = F2-F1 = 2000 Hz
DT il valore del DT calcolato con la formula riportata al paragrafo 4) è: DT = 25 dB
Con i dati impostati si applica l'equazione 1) ottenendo:
3) TL = SL + DI - NL - DT + 10 Log BW = 140 dB + 10 dB - 58 dB - 25 dB + 10 Log 2000 = 100 dB
Dopo il calcolo del TL secondo la 1) si computa ora la variazione del TL in funzione della distanza
R e del coefficiente di assorbimento "a" secondo la 2) ottenendo la 4):
4) TL = 60 dB + 20 Log R + a R = 60 dB + 20 Log R + 0.1 R
dove il valore di "a" ,calcolato con la formula riportata al paragrafo 4), è: a = 0.1 dB/Km
A questo punto non resta che tracciare, su carta millimetrata, la curva di TL secondo la 4) e la
retta TL secondo la 3) in un sistema di assi cartesiani dove, posto R in ascisse e TL in ordinate,
si ottiene il grafico riportato sotto:
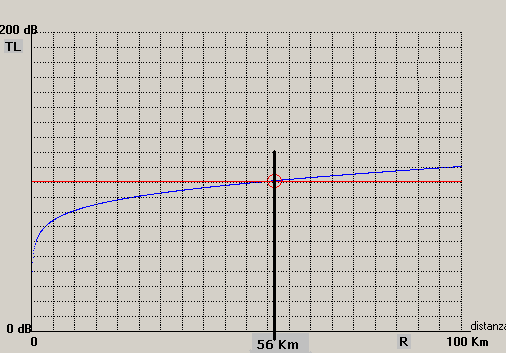
Dal punto d'intersezione tra le due curve si ricava il valore R = 56 Km relativo alla portata di scoperta del sonar
preso in esame.
Dai calcoli svolti si vede come modificando alcune variabili proprie del sonar, come ad esempio
la costante di tempo RC o il valore di "d" la portata di scoperta del sonar può variare; se si accetta
un valore della probabilità di falso allarme inferiore a quella assunta e una probabilità di scoperta
superiore al 90% assumendo un d = 35 la portata di scoperta scende da R = 56 Km a R = 45 Km.
A chiusura di questa pagina è necessario fare alcuni commenti in merito al lavoro svolto:
Il calcolo si basa su 12 variabili che sono frutto di ipotesi e computazioni, già le ipotesi
sono un elemento non veramente certo, così l'assunzione di alcune procedure di calcolo
basate su formule empiriche, si veda ad es. il calcolo di "a", non dà certezza assoluta.
La determinazione della portata di scoperta del sonar passivo è quindi un valore del tutto "indicativo"
che peraltro, non essendo sostituibile con altro, resta pur sempre una guida all'impiego del sonar.
Il valore di R che emerge dal calcolo è comunque fondamentale in fase di progetto del sonar dato
che, pur con le incertezze citate, resta l'unico elemento per il dimensionamento delle parti acustiche
e dell'elettronica di elaborazione dei segnali.
Un ultimo punto delle osservazioni è relativo al paragone tra le prestazioni di due sonar che può essere
fatto soltanto se entrambi, grazie alla procedura illustrata per il calcolo di R, utilizzano le stesse
variabili e/o formule.