SONAR-INFO-p47
BERSAGLI TRAINATI 1) Generalità 2) Le dimensioni di un bersaglio per sonar attivo 3) La struttura dei bersagli trainati per sonar attivi 4)Esame dei livelli acustici del bersaglio per sonar attivo 5) La struttura dei bersagli trainati per sonar passivi 6)Esame dei livelli acustici del bersaglio per sonar passivo
Nella conduzione degli apparati sonar a bordo dei sommergibili è necessario,
periodicamente, un controllo in mare delle prestazioni generali dell'apparato
dipendenti dall'insieme: elettronica, trasduttori, cuffia idrodinamica, cavi e giunzioni,
per verificarne lo stato corretto al fine di garantire la costanza delle condizioni ottimali di scoperta.
La soluzione di questa esigenza sarebbe risolta se si potesse, facilmente, uscire in mare con un
secondo battello come bersaglio; questa condizione non è sempre possibile, sia a causa della
difficoltà ad impegnare un secondo battello operativo, sia per problemi di sicurezza nel caso di
navigazione contemporanea di due sommergibili.
I bersagli trainati, oggetto di questa pagina, possono sopperire alla presenza di
un bersaglio vero risolvendo soddisfacentemente le problematiche accennate.
Se si pensa ad un bersaglio, quale ad esempio un triedro, una sfera od un cilindro ,
questi dovrebbero uguagliare una superficie equivalente pari a quella di
un sommergibile di media grandezza, tale, per intenderci, da presentare un TS (target strength)
dell' ordine di 15 dB.
L'ipotesi dell'impiego di un triedro come bersaglio mobile non è accettabile per la
variazione del suo assetto lungo il percorso che provocherebbe sensibili variazioni del TS.
Per la sfera ed il cilindro, invece, utilizzando le formule sotto riportate, relative alla determinazione
del TS per i due solidi, calcoliamo le dimensioni meccaniche che questi dovrebbero avere per
ottenere un TS = 15 dB:
-per la sfera di raggio r:
essendo TS = 20 Log ( 2 r / 4 )
si ha r = 2 ⋅10 ^(TS / 20) = 2⋅ 10 ^ (15 / 20 ) = 11.2 m
-per il cilindro di raggio r e lunghezza L:
essendo TS = 10 Log ( r L² / 2 landa )
se L = 3 m e landa = 0.15 si ha :
r = (2 landa / L²) (10 ^ TS / 10) = (2 ⋅ 0.15 / 3²) (10 ^ 15/10) = 1.05 m
Dai dati emersi risulta che la sfera non sarebbe ragionevolmente costruibile; per il cilindro,
qualora costruito, si presenterebbero enormi difficoltà di movimentazione e posizionamento alla quota d'impiego.
Da qui nasce l'esigenza della realizzazione di bersagli trainati di tipo elettroacustico dei
quali ci occuperemo nei paragrafi seguenti.
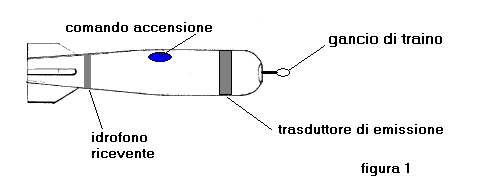
Il bersaglio elettroacustico per sonar attivi è formato da un involucro cilindrico, con diametro di circa 25 cm
ed una lunghezza di circa 1 m, con ogiva di avviamento idrodinamico, alette stabilizzatrici e
comando d'accensione idrostatico così come mostrato in figura 1.
Il bersaglio viene trainato a quota prefissata tramite una fune molto lunga da un mezzo leggero, ad esempio
un motoscafo, al quale viene fatta seguire una rotta stabilita per i rilievi del sonar; raggiunta
la quota il comando d'accensione idrostatico attiva il dispositivo.
Affinché il bersaglio possa avere il TS voluto, 15 dB ad esempio, ogni qualvolta che sarà
colpito da un'impulso acustico emesso dal sonar dovrà a sua volta trasmetterne uno (a simulazione dell'eco),
dopo un tempo brevissimo, ad un livello di 15 dB superiore.
Per ottenere le prestazioni indicate il bersaglio deve avere una struttura
secondo lo schema a blocchi di figura 2 che andiamo a descrivere:

Il bersaglio è costituito da:
-ir = idrofono ricevente
-amf = amplificatore e filtro dell'impulso d'ingresso
-rv = rivelatore impulso amplificato
-cli = calcolatore livello e durata dell'impulso
-prle = predispositore livello di trasmissione e blocco ricevitore
-pl = generatore impulso di trasmissione
-Tx = trasmettitore di potenza
-te = trasduttore di emissione
Il funzionamento del sistema è il seguente:
l'impulso acustico emesso dal sonar colpisce l'idrofono ricevente (ir), la tensione impulsiva
ai suoi capi viene amplificata e filtrata nella banda stabilita dall'amplificatore (amf).
L'impulso in uscita da (amf) viene rivelato di cresta da (rv) ed inviato al misuratore di livello (cli).
Il segnale in uscita da (cli) è ricevuto dal predispositore di livello (prle) che ne valuta la durata e
l'ampiezza ed, in base al TS stabilito, definisce il livello dell'impulso da emettere; contemporaneamente
blocca il ricevitore (amf).
Da (prle) scaturisce il comando per il generatore dell'impulso di trasmissione (pl) che sviluppa un
impulso di ampiezza e durata stabilita.
Il trasmettitore di potenza (Tx) riceve l'impulso d'emissione da (pl) e lo applica al trasduttore (te)
per la restituzione in acqua dell'eco sintetico.
Una volta avvenuta l'emissione il sistema si predispone automaticamente per la ricezione di un
nuovo impulso e la successiva emissione dell'eco sintetico.
Per avere un'idea sui livelli acustici che interessano il bersaglio si prende in esame
l'emissione di un sonar installato a bordo di un sommergibile che deve ricevere l'eco sintetica
di detto bersaglio.
Da P44 si riportano alcuni dati relativi ad un esercizio sulla portata di un sonar attivo:
F = 9000 Hz
Li = 240 dB/microPa
R = 10 Km
alfa = 0.89 dB/Km
t = 15 mSec
Con questi dati il livello Ir dell'impulso che raggiunge il bersaglio
(attenuazione di sola andata) è:
Ir = Li - ( 60 dB + 10 Log R + alfa R ) =
= 240 -( 60 + 10 Log 10 + 0.89 ⋅ 10) = 161 dB/microPa
A seguito dell'impulso ricevuto il bersaglio, dopo le opportune elaborazioni, emette un impulso (Ie)
di ampiezza Ie = Ir + 15 dB = 176 dB/microPa.
Tale livello di emissione, se il trasduttore (te) ha, ad esempio, una risposta di 140 dB/microPa/Volt,
si ottiene applicando a (te) una tensione Vtx di:
Vtx = 176 dB/microPa - 140 dB/microPa/Volt = 36 dB / volt = 63 Volt
Il livello di potenza richiesto per lemissione, essendo impulsiva, non crea alcun problema di
autonomia sulle batterie del sistema.
Il bersaglio elettroacustico per sonar passivi è formato da un involucro cilindrico
simile a quello mostrato in figura 1 salvo la mancanza dell'idrofono ricevente.
Il bersaglio viene trainato, tramite una fune molto lunga, da un mezzo leggero, ad esempio
un motoscafo, al quale viene fatta seguire una rotta stabilita per i rilievi del sonar.
Il bersaglio può avere una struttura secondo il semplice schema a blocchi di figura 3:
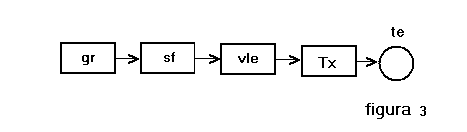
dove:
-gr = generatore di rumore ad ampio spettro
-sf = selettore banda di emissione
-vle = variatore del livello d'emissione
-Tx = trasmettitore di potenza
-te = trasduttore d'emissione
Il bersaglio viene predisposto, prima dell'immersione, mediante l'impostazione della banda, con
(sf), e del livello del segnale, con (vle), che deve essere inviato a trasduttore d'emissione (te).
Per avere un'idea sui livelli di emissione di un bersaglio per sonar passivo è indicativo
il confronto tra detti livelli e quelli relativi ad un CT a 20 nodi.
Se s'ipotizza, in base all'esempio di pagina P42, la ricezione da parte del sonar in una banda
di frequenze compresa tra 1000 e 3000 Hz, in tale banda il livello di rumore emesso da un
CT a 20 nodi è:
SL(ct) = 140 dB/microPa/Hz ;
ovvero SL(ct)in banda = 140 dB/microPa/Hz + 10 Log (3000-1000)= 173 dB/microPa
Se il trasduttore (te) del bersaglio ha, ad esempio, una risposta di 135 dB/microPa/Volt
e una resistenza di carico Rc = 50 ohm, per ottenere il livello di pressione di 173 dB/microPa
la tensione applicata deve essere:
Vtx = 173 dB/microPa - 135 dB/microPa/Volt = 38 dB/Volt pari a 79 V
con una richiesta di potenza continua pari a:
P = 79&esp2 / 50 ohm = 125 W
Se il rendimento del trasmettitore è dell'ordine del 70% il valore della potenza
totale richiesta è ancora sostenibile da un sistema autonomo alimentato con batterie
industriali.