SONAR-INFO-p48
SULLA DISTRIBUZIONE SPAZIALE DEL RUMORE EMESSO DA NAVI
1)Generalità 2)Caratteristiche della distribuzione spaziale del rumore delle navi 3)Considerazioni finali 4)Bibliografia
Considerazioni sulla possibilità di usare un sistema idrofonico come ausilio alla
riemersione di mezzi subacquei.
Per lo studio di fattibilità di un apparato sonar per piccoli mezzi subacquei avente lo
scopo di indicare all'equipaggio la presenza di natanti nella zona di mare circostante
il punto di riemersione è necessario che nel progetto e nella realizzazione di tale apparato
le funzioni operative del sistema vengano alquanto limitate al solo modo passivo.
D'altra parte, condizione necessaria perché una decisione in tal senso possa essere presa, è
che anche nella configurazione suddetta la probabilità di scoperta dell'apparato si mantenga
sensibilmente vicino al 100% nei confronti della stragrande maggioranza dei mezzi di superficie
da considerare.
Data per scontata la nozione che il rumore irradiato dai natanti in movimento presenta
livelli di pressione tale da consentire la scoperta a brevi distanze anche ad impianti
di ridotta complessità resta il dubbio se la distribuzione spaziale del rumore stesso
abbia caratteristiche di direzionalità tali da impedire la ricezione per particolari
configurazioni geometriche (aspetti) del natante rispetto al sensore ricevente.
Sulla base di questa considerazione e' stata condotta un'indagine bibliografica avente
lo scopo di raccogliere il maggior numero possibile di dati sull'argomento.
Prima di presentare alcuni diagrammi reperiti nella letteratura è bene sottolineare un
punto che viene sistematicamente ripetuto da tutti gli autori consultati:
-Il rumore irradiato in acqua dalle navi di superficie è generalmente quasi
omnidirezionale soprattutto alle basse frequenze ( f <= 1-2 KHz ).
A frequenze più elevate i diagrammi di direttività rilevati nel piano orizzontale
tendono ad assumere la caratteristica forma a "farfalla" con le ali spiegate
nelle direzioni al traverso e due minimi nelle direzioni prodiera e poppiera.
L'andamento ora citato è ben visibile nella figura 1 tratta da (1).

Essa, seguendo una convenzione standard, riporta il rumore irradiato nel piano orizzontale con
il metodo delle isobare ( curve di uguale livello di pressione acustica ) per un tipico battello
in movimento.
Il tipo del natante e le frequenze in gioco non sono specificati.
Le figure 2a e 2b, tratte da (2), riportano rispettivamente i diagrammi di direttività medi,
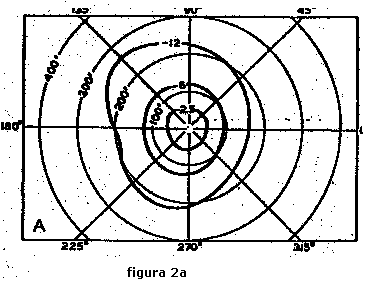
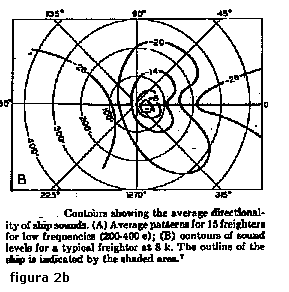
qualunque sia l'aspetto che il natante presenta al sistema dei sensori, di 15 mercantili
(classe Liberty) e di quello che gli autori indicano come "un tipico cargo a 8 nodi" in cui
la gamma di frequenze va da 200 a 400 Hz.
Il riferimento (3), infine, riporta in figura 3 il diagramma di radiazione di un altro cargo
alla velocità di 8 nodi, misurato con una cortina di idrofoni posti sul fondo alla profondità
fi 40 piedi.
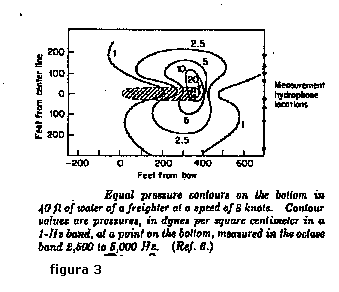
La banda di frequenze in esame va da 2500 a 5000 Hz, e coincide con quella che viene generalmente
considerata la gamma più elevata nelle applicazioni dei sonar passivi.
Nonostante la frequenza relativamente alta, si noti come la direttività del rumore irradiato sia
ancora tale da consentire l'emissione di una considerevole quantità di energia acustica
nelle direzioni meno favorite (prora e poppa).
In definitiva lo studio effettuato consente di trarre le seguenti considerazioni:
1) -Alle basse frequenze ( f <= 1-2 KHz ) la scoperta acustica passiva di una
nave di superficie dovrebbe essere garantita , in assenza, naturalmente, di condizioni
anomale di propagazione, qualunque sia l'aspetto che il natante presenta alla base ricevente.
2)-Alle frequenze più alte la circostanza di cui al punto 1) non può essere assicurata nella
totalità dei casi ma resta comunque molto probabile.
Infatti, anche se il diagramma di radiazione può presentare, nel piano orizzontale, minimi
pronunciati, in vista della particolare applicazione qui considerata (scoperta di un mezzo
di superficie da parte di uno immerso) la configurazione geometrica del sistema può risultare,
soprattutto alle brevi distanze, sensibilmente diversa da quelle riportate nella letteratura,
dando luogo a distribuzioni spaziali presumibilmente più favorevoli per gli scopi esaminati.
Concludendo si può pensare che, il linea di massima, l'apparato acustico passivo in esame debba
essere costituito da:
-Una componente a bassa frequenza, bassa discriminazione spaziale ed alta probabilità di scoperta,
in grado di fornire all'equipaggio del mezzo subacqueo la certezza sull'assenza o presenza di
natanti in movimento di superficie.
-Una componente in alta frequenza, con minore probabilità di scoperta rispetto alla precedente,
ma in grado di determinare la posizione angolare di eventuali sorgenti di rumore con l'accuratezza
sufficiente alla determinazione della mappa del traffico navale nelle vicinanze del punto previsto
per la riemersione.
(1) L.Guieysse, P.Sabathè: Acoustique Sous_Marine, ed. Dunod
(2) Autori vari: Principles and Applications of Underwater Sound; Dept. of the Navy, Washington, D.C.
(3) R.J. Urick: Principles of Underwater Sound, ed. McGraw-Hill