SONAR-INFO-p64
Misura della distanza in passivo 1)Introduzione 2)La struttura originale del misuratore passivo della distanza 4) Sul funzionamento degli apparati originali 5) La misura della distanza per riflessione dal fondo
Storia, teoria e tecnica
Gli studi sulla misura della distanza di una sorgente acustica in mare risalgono al tempo dell'ultima
guerra da parte dagli USA e di altri stati stranieri.
Nel nostro Paese si è manifestato l'interesse per tali studi dopo il 1960, quando, informati
sulle esperienze positive svolte sui sommergibili USA USS HARDER(SS-568) dotati di misuratore
passivo della distanza si pensò di svilupparlo anche per i sommergibili italiani (nella fotografia
sono indicati con segmenti blu i sensori del misuratore).
Questa introduzione storica, che precede la parte teorica del problema, è di fondamentale importanza
per valutare le difficoltà che si sono incontrate nello studio e nello sviluppo tecnologico
di tutta la problematica che investe "la misura passiva della distanza".
La misura in oggetto veniva attuata mediante la struttura indicata in figura 1:
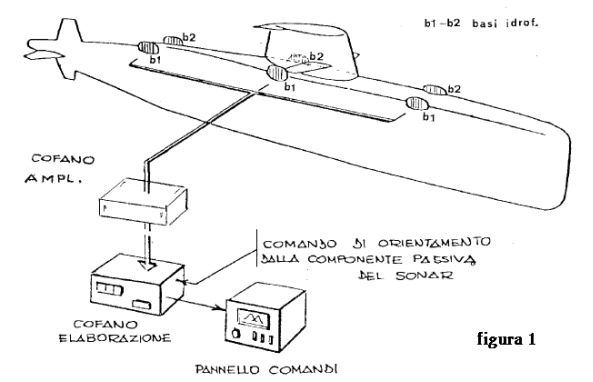
In figura si vedono, montati sullo scafo, due serie di tre sensori disposti sui fianchi; sul
lato destro i tre sensori (b1) e sul lato sinistro i tre sensori (b2); ciascuna terna costituiva
una particolare base idrofonica ricevente (ciascun sensore e stato genericamente nominato pinna).
I segnali elettrici provenienti dalle due basi venivano inviati, dopo amplificazione e filtraggio,
all'elaboratore per il calcolo della distanza della sorgente acustica rivelata dal sonar passivo;
con il sonar passivo, oltre ad individuare la sorgente acustica, si trasferiva all'elaboratore
del misuratore di distanza il dato angolare relativo alla posizione del bersaglio per il
corretto puntamento del misuratore di distanza.
La presenza di due basi idrofoniche sui fianchi del battello era un modo per affrontare il
problema sui nostri battelli, diversamente, come mostrano le tre grosse pinne verticali nella fotografia del sommergibile USS HARDER(SS-568),
la base era unica e disposta sulla mezzeria dello scafo.
La disposizione delle due basi sul sommergibile Toti (misuratore passivo sperimentale MD64)
è visibile in figura 2 dove le pinne sono indicate con segmenti bianchi: questo apparato aveva come obiettivo la conferma delle teorie e della
tecnologia adottate e la verifica "fuori tutto" delle prestazioni del misuratore di distanza.

La disposizione delle due basi sul sommergibile Sauro (misuratore passivo MD100) è visibile in
figura 2/a dove le pinne sono indicate con segmenti bianchi:

3)La teoria della misura nella struttura originale
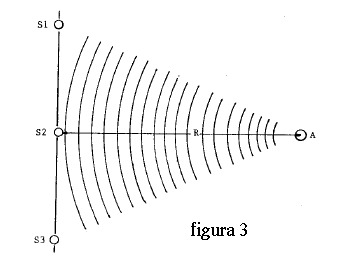
La propagazione delle onde acustiche da parte di una sorgente avviene sempre o secondo una geometria
sferica o sferico-cilindrica per cui una delle basi acustiche a tre sensori di cui al par.2) viene
colpita dal suono con onde "circolari" così come mostrato in figura 3.
Su questa geometria s'imposta l'algoritmo per la misura della distanza che, nel caso più
semplice, prevede la sorgente sulla perpendicolare della base come mostra la figura 4:
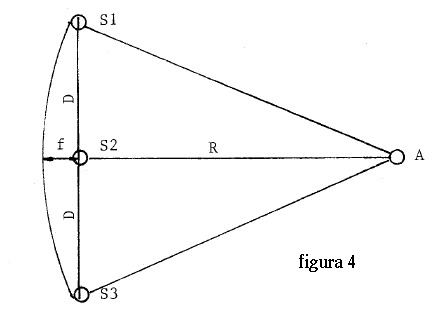
Nella figura 4 si vedono il fronte d'onda circolare che, dopo aver colpito inizialmente s2, si è spostato
verso sinistra fino a colpire contemporaneamente s1 e s3 e, definite da lettere, rispettivamente:
R = distanza della sorgente acustica
D = distanza tra due sensori
f = freccia del cerchio di raggio R
Con la semplice formula relativa alla circonferenza si può scrivere la relazione tra raggio R,
semicorda D e freccia f:
D² = f( 2R + f )
Dato che nelle condizioni operative in mare la lunghezza della freccia f è trascurabile rispetto
al valore di R si può in definitiva scrivere:
D² = f( 2R ) da cui R = D² / 2 f
Se valutiamo il tempo tr che il suono impiega a coprire l'intervallo f abbiamo:
tr = f/c ovvero f = tr c
dove c è la velocità del suono in acqua.
Ne segue infine che R può essere espressa in funzione di tr come :
R = D² / 2 tr C .
Con l'algoritmo ora trovato veniva dedotta la distanza R dopo aver misurato il valore di tr
relativo al ritardo tra il segnale idrofonico che colpisce il sensore s2 e il segnale che
colpisce i sensori s1-s3; questa operazione veniva eseguita mediante le tecniche di
correlazione così come illustrato in P5/Cap. 9 / par. 9.11 / pag. 316.
Al fine di una valutazione degli apparati originali è anzitutto utile esaminare come agiscono le
variabili che concorrono all'algoritmo ricavato in 3); se ad esempio tra i sensori è
D = 25 m e la distanza della sorgente è 10000 m il valore
di tr risulta:
tr = D² / 2 R C = 25² / 2 x 10000 x 1530 = 20.4 microSec.
Per contenere l'errore di misura di R, ad esempio in 500 m a 10000 m, la valutazione strumentale
di tr doveva essere entro il 5%, pari a 1 microSec.
Il problema della misura della distanza con metodo passivo non riguardava soltanto la precisione
strumentale ma, ben di più, il rapporto tra segnale e disturbo presente in mare nonché la deformazione
del fronte d'onda all'atto del rilievo.
Il rapporto S/N poteva essere migliorato soltanto giocando sul guadagno di direttività delle basi
che, come sappiamo (si veda P41 ), dipende dalle dimensioni delle basi stesse.
Nella tabella sottostante, per una sorta di confronto tra i dati di partenza, sono riportati i
dati salienti relativi ai tre sommergibili menzionati nel testo; non essendo a conoscenza delle
misure esatte delle lunghezze delle basi nei tre casi si assume:
L = lunghezza del battello data dal cantiere
2D = 80% L
A = superficie pinne = in base a vecchi dati
f = frequenza operativa = 8000 Hz per tutti gli apparati.

Il misuratore della distanza MD64 ha dato discreti risultati su distanze non molto elevate, la
limitazione di portata è stata senz'altro causata dal basso guadagno delle pinne;
dalla comparazione della tabella si può infatti osservare che la base aveva un guadagno di
soli 18 dB contro i 29 degli USA e che il tr era di soli 10 microSec a 10000 m, contro i 40
microSec degli USA, con evidente difficoltà nella misura precisa di un tempo così piccolo.
Il misuratore passivo MD100 ha avuto prestazioni limitate a causa delle ridotte dimensioni
delle pinne; dimensioni superiori sarebbero state auspicabili ma i cantieri ritennero
che, in base al dislocamento del battello, ciò non fosse prudente.
Nel confronto con l'apparato USA si aveva un guadagno delle basi inferiore di ben 7 dB, ciò
che, secondo lo scrivente, era una delle ragioni primarie che ne faceva la differenza.
Il metodo di misura passiva della distanza originale è stato sostituito da quello per
riflessione dal fondo;
*i vantaggi del nuovo sistema sono:
-a) eliminazione totale delle pinne che costituiscono le basi del sistema originale
-b) misura indipendente dalla curvatura del fronte d'onda e dalle sue deformazioni
-c) misura di un angolo in vece che di un piccolo tempo di ritardo
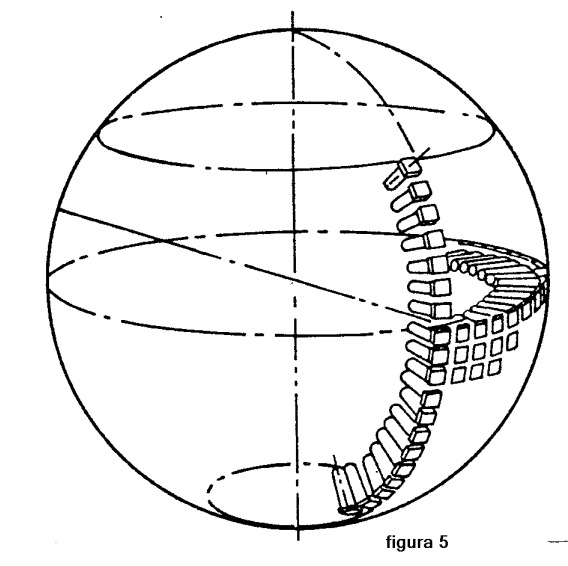
*Il prezzo da pagare per realizzare questo misuratore passivo di distanza è la costruzione di un sonar non convenzionale:
Il sonar deve essere dotato di base sferica, vedi figura 5, e di due componenti idrofoniche per eseguire i seguenti rilievi:
a)Componente 1 = scoperta della sorgente acustica e misura della direzione nel piano orizzontale.
b)Componente 2 = misura, nel piano verticale, dell'angolo di depressione β dei raggi
sonori della sorgente riflessi dal fondo.
Per eseguire la misura della distanza con il metodo della riflessione
dal fondo si deve considerare la geometria mostrata in figura 6 nel caso che misuratore e sorgente siano alla
stessa quota:
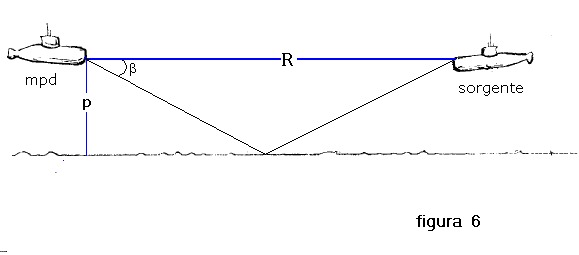
Con semplice sviluppo trigonometrico si giunge all'algoritmo di calcolo che mostriamo:
R = 2 P / tang β
dove R è la distanza dalla sorgente
P la distanza dal fondo
β è l'angolo di depressione
Nel caso più generale che il misuratore e la sorgente non siano alla stessa quota la
procedura di calcolo introduce un errore che è funzione, sia della differenza di quota (dq) tra
i due, sia della distanza R = f(β).
Dall'esame della figura 6/a si ricava l'espressione che indica l'errore percentuale (ep)
commesso in funzione del (dq) ed R = f(β):
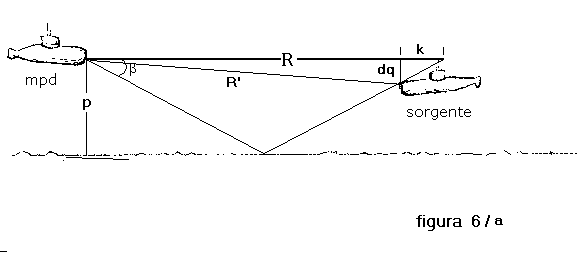
k = dq / Tan(β)
R1 = √[(R - k)² + dq²]
ep = 100 (R - R1) / R
Ad esempio:
ipotizzando una profondità P = 3000 m; con β = 16°; il misuratore passivo indicherà:
R = 21000 m; mentre, per la presenza della differenza di quota dq = 300 m, il valore reale
della distanza dalla sorgente sarà R1 = 19890 con un errore del 5% rispetto al valore misurato.
In fase operativa l'errore ep può essere minimizzato mediante l'introduzione, a calcolo, del
valore stimato di dq.
L'efficacia di questo sistema di misura non è stata mai provata in via sperimentale, nel passato, dato che
sui battelli disponibili, classi Toti e Sauro, era impossibile collocare una base sferica delle dimensioni
adatte ai rilievi da eseguire.
Home